 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Twisting Sliding Control for Integrated Attack UAV's Autopilot and Guidance
Jan 17, 2025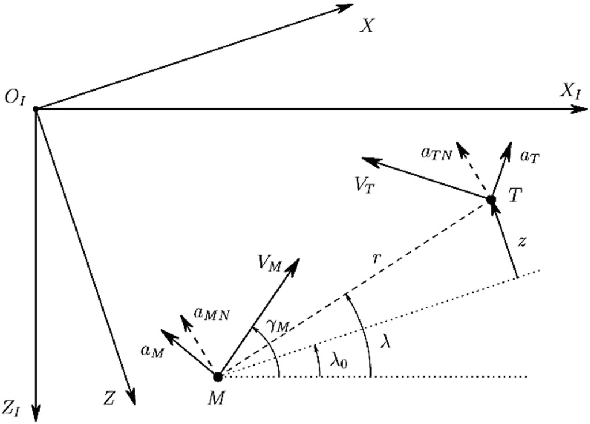

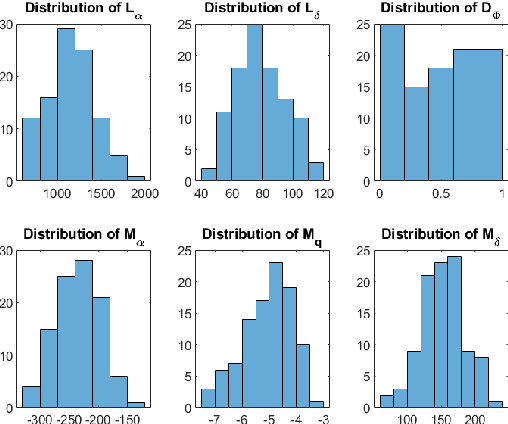
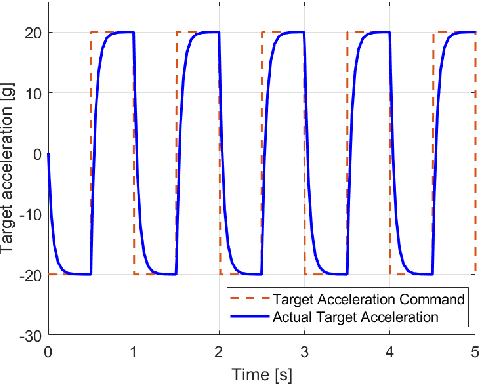
This paper investigates an adaptive sliding-mode control for an integrated UAV autopilot and guidance system. First, a two-dimensional mathematical model of the system is derived by considering the incorporated lateral dynamics and relative kinematics of the UAV and its potential target of attack. Then, a sliding surface is derived utilizing the zero-effort miss distance. An adaptive twisting sliding mode (ATSMC) algorithm is applied to the integrated system. Simulation and comparisons have been accomplished. The results show our proposed design performs well in interception precision, even with high nonlinearity, uncertainties, disturbances, and abrupt changes in the target's movement, thanks to the adaptation strategy.
Path Planning for a UAV Swarm Using Formation Teaching-Learning-Based Optimization
Jan 16, 2025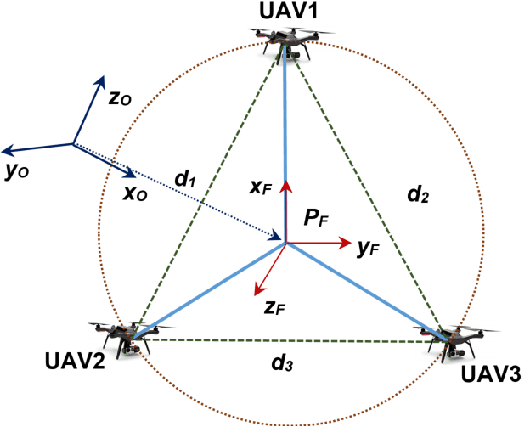

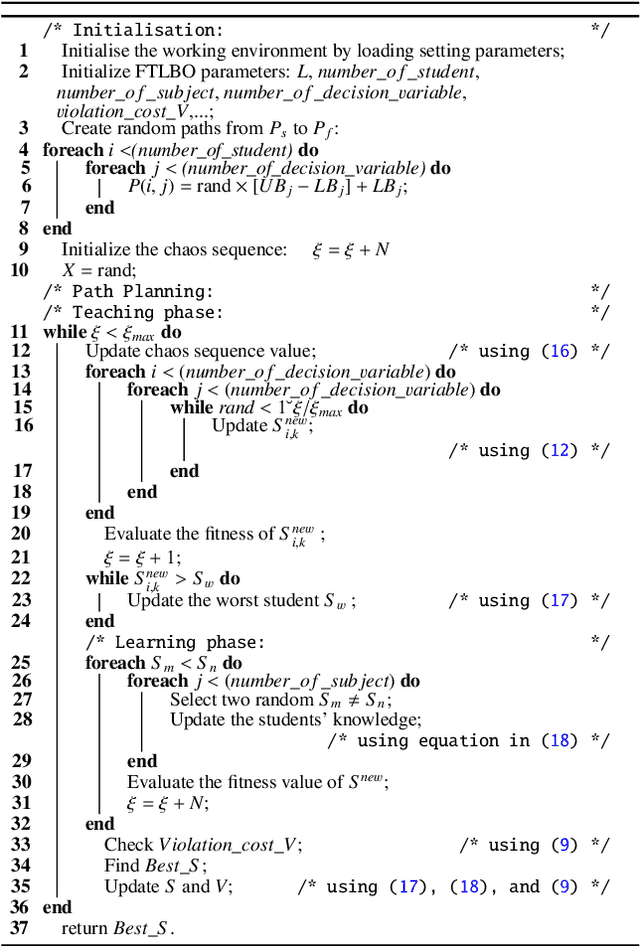
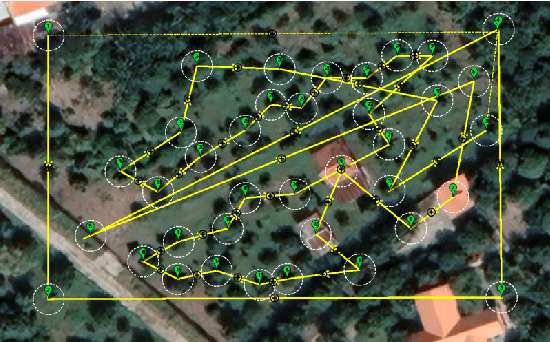
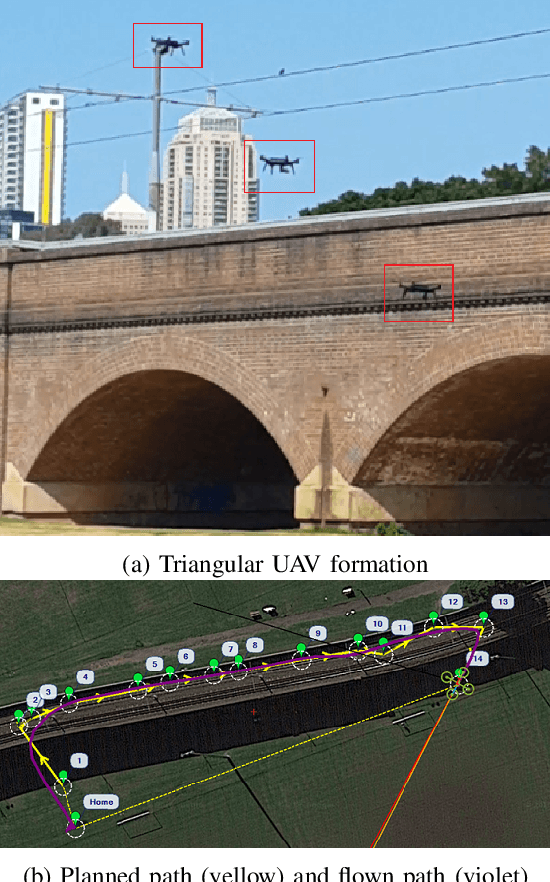
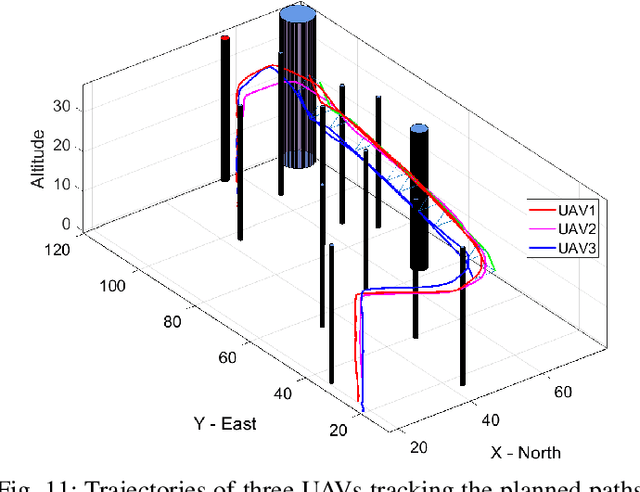
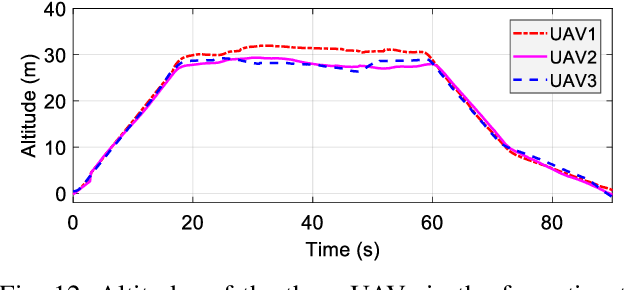
This work addresses the path planning problem for a group of unmanned aerial vehicles (UAVs) to maintain a desired formation during operation. Our approach formulates the problem as an optimization task by defining a set of fitness functions that not only ensure the formation but also include constraints for optimal and safe UAV operation. To optimize the fitness function and obtain a suboptimal path, we employ the teaching-learning-based optimization algorithm and then further enhance it with mechanisms such as mutation, elite strategy, and multi-subject combination. A number of simulations and experiments have been conducted to evaluate the proposed method. The results demonstrate that the algorithm successfully generates valid paths for the UAVs to fly in a triangular formation for an inspection task.
Path Planning for Multi-Copter UAV Formation Employing a Generalized Particle Swarm Optimization
Jan 10, 2025
The paper investigates the problem of path planning techniques for multi-copter uncrewed aerial vehicles (UAV) cooperation in a formation shape to examine surrounding surfaces. We first describe the problem as a joint objective cost for planning a path of the formation centroid working in a complicated space. The path planning algorithm, named the generalized particle swarm optimization algorithm, is then presented to construct an optimal, flyable path while avoiding obstacles and ensuring the flying mission requirements. A path-development scheme is then incorporated to generate a relevant path for each drone to maintain its position in the formation configuration. Simulation, comparison, and experiments have been conducted to verify the proposed approach. Results show the feasibility of the proposed path-planning algorithm with GEPSO.
* 6 pages, 8 figures, conference
Enhanced Teaching-Learning-based Optimization for 3D Path Planning of Multicopter UAVs
May 31, 2022This paper introduces a new path planning algorithm for unmanned aerial vehicles (UAVs) based on the teaching-learning-based optimization (TLBO) technique. We first define an objective function that incorporates requirements on the path length and constraints on the movement and safe operation of UAVs to convert the path planning into an optimization problem. The optimization algorithm named Multi-subject TLBO is then proposed to minimize the formulated objective function. The algorithm is developed based on TLBO but enhanced with new operations including mutation, elite selection and multi-subject training to improve the solution quality and speed up the convergence rate. Comparison with state-of-the-art algorithms and experiments with real UAVs have been conducted to evaluate the performance of the proposed algorithm. The results confirm its validity and effectiveness in generating optimal, collision-free and flyable paths for UAVs in complex operating environments.
* Proceedings of the International Conference on Advanced Mechanical Engineering, Automation, and Sustainable Development 2021 (AMAS2021)
System Architecture for Real-time Surface Inspection Using Multiple UAVs
Jul 07, 2019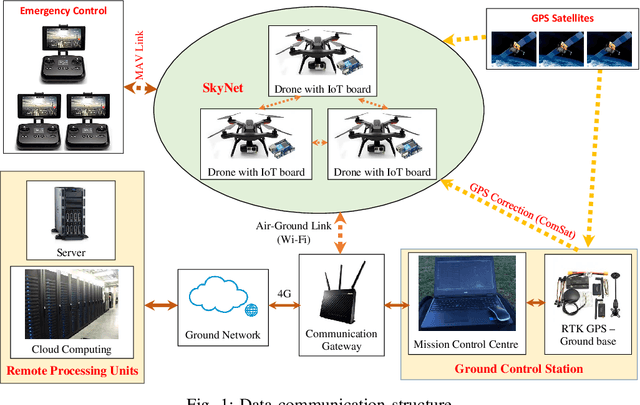
This paper presents a real-time control system for surface inspection using multiple unmanned aerial vehicles (UAVs). The UAVs are coordinated in a specific formation to collect data of the inspecting objects. The communication platform for data transmission is based on the Internet of Things (IoT). In the proposed architecture, the UAV formation is established via using the angle-encoded particle swarm optimisation to generate an inspecting path and redistribute it to each UAV where communication links are embedded with an IoT board for network and data processing capabilities. Data collected are transmitted in real time through the network to remote computational units. To detect potential damage or defects, an online image processing technique is proposed and implemented based on histograms. Extensive simulation, experiments and comparisons have been conducted to verify the validity and performance of the proposed system.
Adaptive Second-order Sliding Mode Control of UAVs for Civil Applications
Jul 31, 2017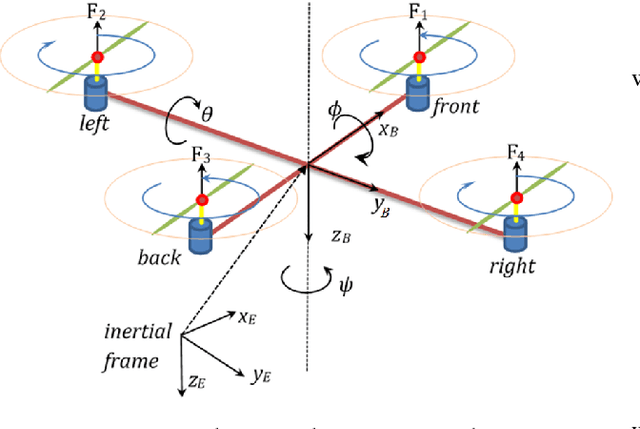
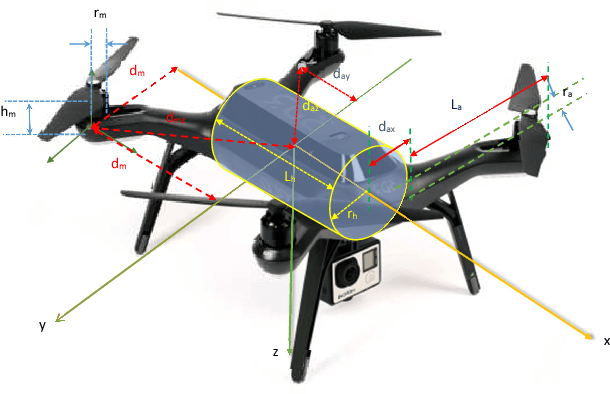


Quadcopters, as unmanned aerial vehicles (UAVs), have great potential in civil applications such as surveying, building monitoring, and infrastructure condition assessment. Quadcopters, however, are relatively sensitive to noises and disturbances so that their performance may be quickly downgraded in the case of inadequate control, system uncertainties and/or external disturbances. In this study, we deal with the quadrotor low-level control by proposing a robust scheme named the adaptive second-order quasi-continuous sliding mode control (adaptive 2-QCSM). The ultimate objective is for robust attitude control of the UAV in monitoring and inspection of built infrastructure. First, the mathematical model of the quadcopter is derived considering nonlinearity, strong coupling, uncertain dynamics and external disturbances. The control design includes the selection of the sliding manifold and the development of quasi-continuous second-order sliding mode controller with an adaptive gain. Stability of the overall control system is analysed by using a global Lyapunov function for convergence of both the sliding dynamics and adaptation scheme. Extensive simulations have been carried out for evaluation. Results show that the proposed controller can achieve robustness against disturbances or parameter variations and has better tracking performance in comparison with experimental responses of a UAV in a real-time monitoring task.
Automatic Crack Detection in Built Infrastructure Using Unmanned Aerial Vehicles
Jul 31, 2017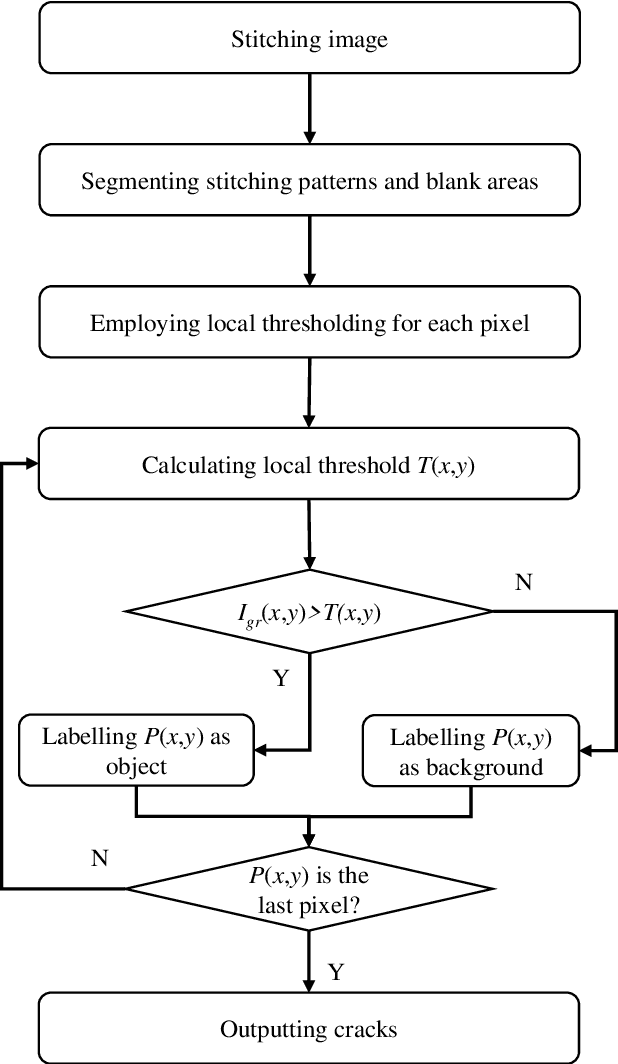

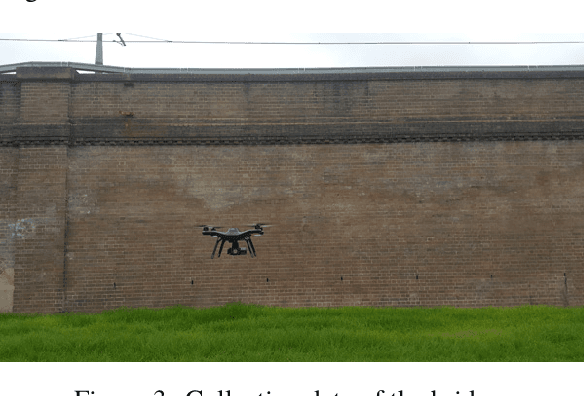
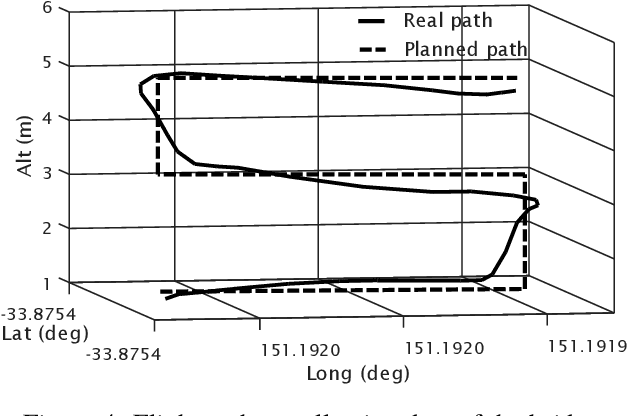
This paper addresses the problem of crack detection which is essential for health monitoring of built infrastructure. Our approach includes two stages, data collection using unmanned aerial vehicles (UAVs) and crack detection using histogram analysis. For the data collection, a 3D model of the structure is first created by using laser scanners. Based on the model, geometric properties are extracted to generate way points necessary for navigating the UAV to take images of the structure. Then, our next step is to stick together those obtained images from the overlapped field of view. The resulting image is then clustered by histogram analysis and peak detection. Potential cracks are finally identified by using locally adaptive thresholds. The whole process is automatically carried out so that the inspection time is significantly improved while safety hazards can be minimised. A prototypical system has been developed for evaluation and experimental results are included.