 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Second-order Sliding Mode Control of UAVs for Civil Applications
Paper and Code
Jul 31, 2017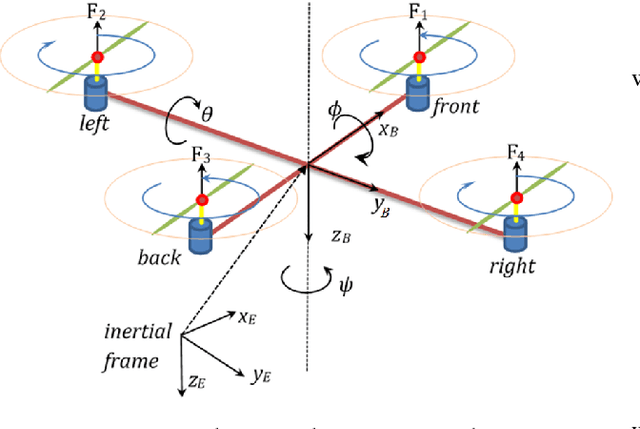
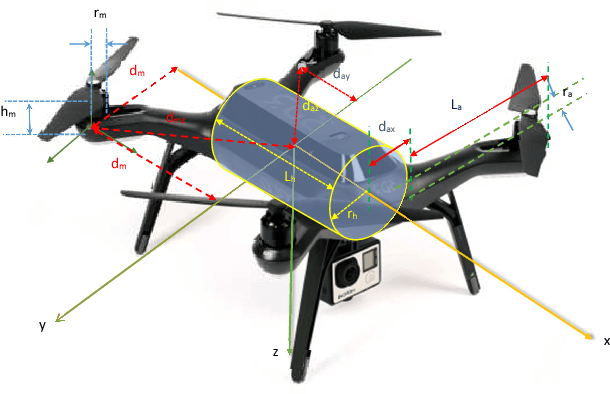


Quadcopters, as unmanned aerial vehicles (UAVs), have great potential in civil applications such as surveying, building monitoring, and infrastructure condition assessment. Quadcopters, however, are relatively sensitive to noises and disturbances so that their performance may be quickly downgraded in the case of inadequate control, system uncertainties and/or external disturbances. In this study, we deal with the quadrotor low-level control by proposing a robust scheme named the adaptive second-order quasi-continuous sliding mode control (adaptive 2-QCSM). The ultimate objective is for robust attitude control of the UAV in monitoring and inspection of built infrastructure. First, the mathematical model of the quadcopter is derived considering nonlinearity, strong coupling, uncertain dynamics and external disturbances. The control design includes the selection of the sliding manifold and the development of quasi-continuous second-order sliding mode controller with an adaptive gain. Stability of the overall control system is analysed by using a global Lyapunov function for convergence of both the sliding dynamics and adaptation scheme. Extensive simulations have been carried out for evaluation. Results show that the proposed controller can achieve robustness against disturbances or parameter variations and has better tracking performance in comparison with experimental responses of a UAV in a real-time monitoring task.