 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrack Detection Using Enhanced Hierarchical Convolutional Neural Networks
Dec 13, 2019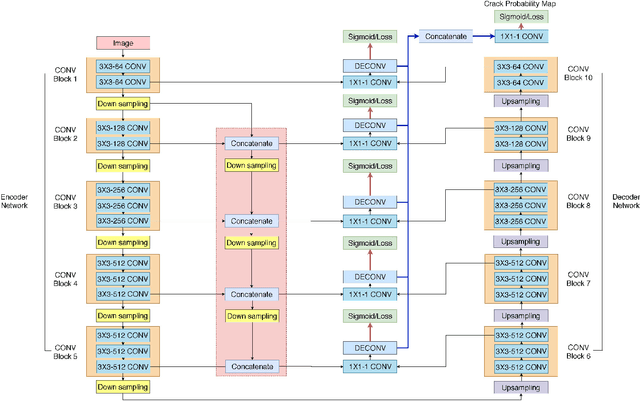

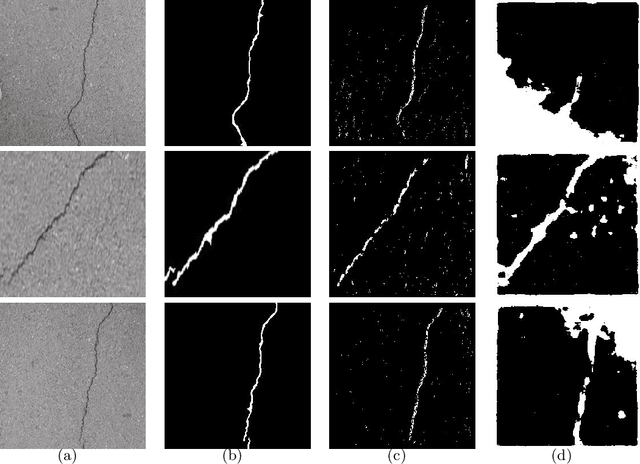
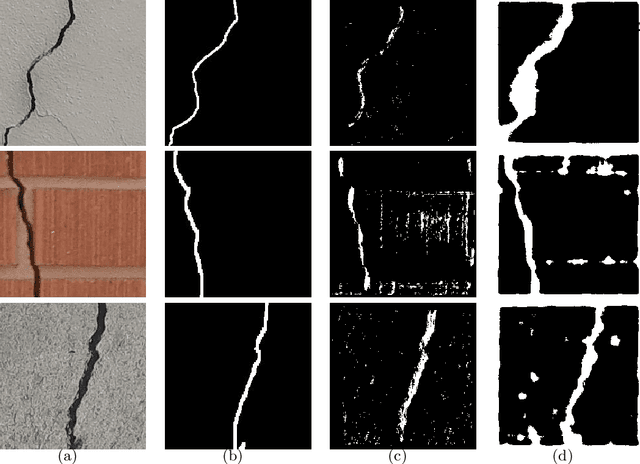
Unmanned aerial vehicles (UAV) are expected to replace human in hazardous tasks of surface inspection due to their flexibility in operating space and capability of collecting high quality visual data. In this study, we propose enhanced hierarchical convolutional neural networks (HCNN) to detect cracks from image data collected by UAVs. Unlike traditional HCNN, here a set of branch networks is utilised to reduce the obscuration in the down-sampling process. Moreover, the feature preserving blocks combine the current and previous terms from the convolutional blocks to provide input to the loss functions. As a result, the weights of resized images can be reduced to minimise the information loss. Experiments on images of different crack datasets have been carried out to demonstrate the effectiveness of proposed HCNN.
Modelling and Fast Terminal Sliding Mode Control for Mirror-based Pointing Systems
Dec 19, 2018

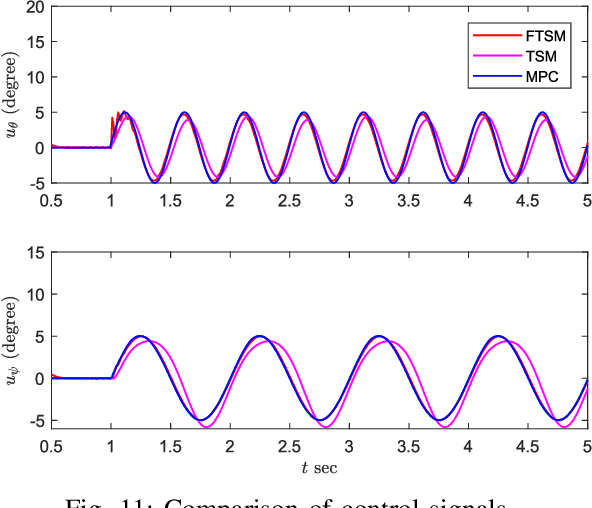
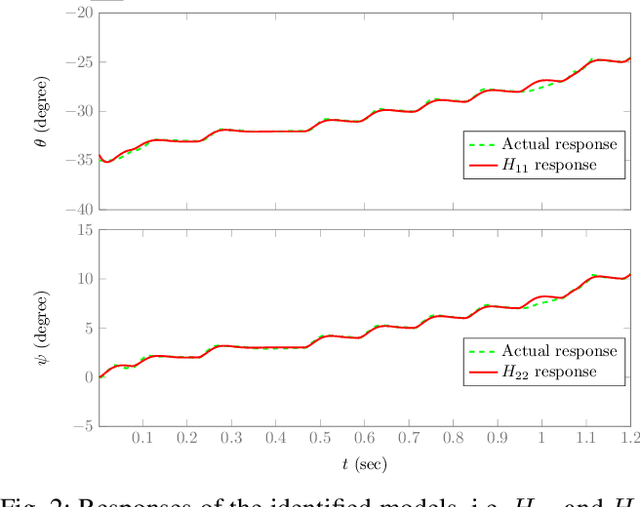
In this paper, we present a new discrete-time Fast Terminal Sliding Mode (FTSM) controller for mirror-based pointing systems. We first derive the decoupled model of those systems and then estimate the parameters using a nonlinear least-square identification method. Based on the derived model, we design a FTSM sliding manifold in the continuous domain. We then exploit the Euler discretization on the designed FTSM sliding surfaces to synthesize a discrete-time controller. Furthermore, we improve the transient dynamics of the sliding surface by adding a linear term. Finally, we prove the stability of the proposed controller based on the Sarpturk reaching condition. Extensive simulations, followed by comparisons with the Terminal Sliding Mode (TSM) and Model Predictive Control (MPC) have been carried out to evaluate the effectiveness of the proposed approach. A comparative study with data obtained from a real-time experiment was also conducted. The results indicate the advantage of the proposed method over the other techniques.
Adaptive Second-order Sliding Mode Control of UAVs for Civil Applications
Jul 31, 2017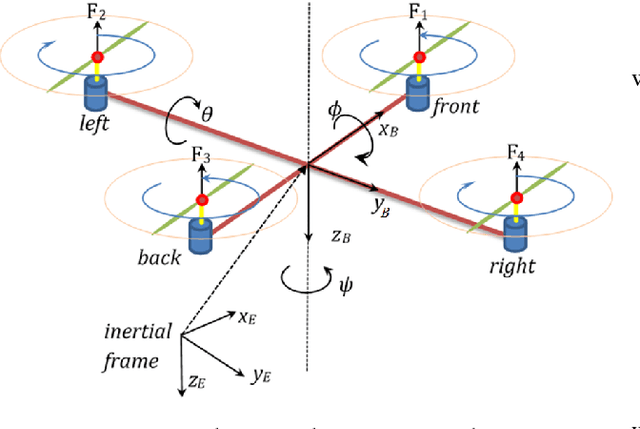
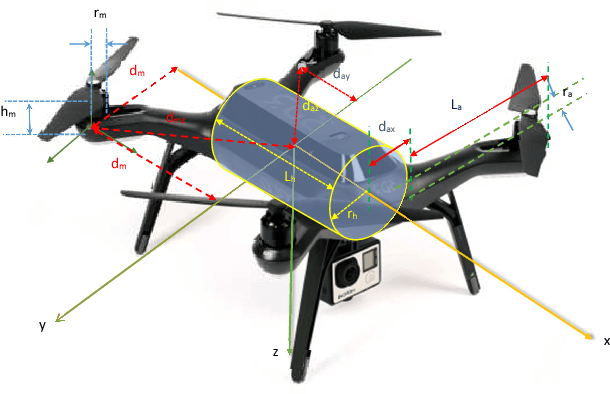


Quadcopters, as unmanned aerial vehicles (UAVs), have great potential in civil applications such as surveying, building monitoring, and infrastructure condition assessment. Quadcopters, however, are relatively sensitive to noises and disturbances so that their performance may be quickly downgraded in the case of inadequate control, system uncertainties and/or external disturbances. In this study, we deal with the quadrotor low-level control by proposing a robust scheme named the adaptive second-order quasi-continuous sliding mode control (adaptive 2-QCSM). The ultimate objective is for robust attitude control of the UAV in monitoring and inspection of built infrastructure. First, the mathematical model of the quadcopter is derived considering nonlinearity, strong coupling, uncertain dynamics and external disturbances. The control design includes the selection of the sliding manifold and the development of quasi-continuous second-order sliding mode controller with an adaptive gain. Stability of the overall control system is analysed by using a global Lyapunov function for convergence of both the sliding dynamics and adaptation scheme. Extensive simulations have been carried out for evaluation. Results show that the proposed controller can achieve robustness against disturbances or parameter variations and has better tracking performance in comparison with experimental responses of a UAV in a real-time monitoring task.
Automatic Crack Detection in Built Infrastructure Using Unmanned Aerial Vehicles
Jul 31, 2017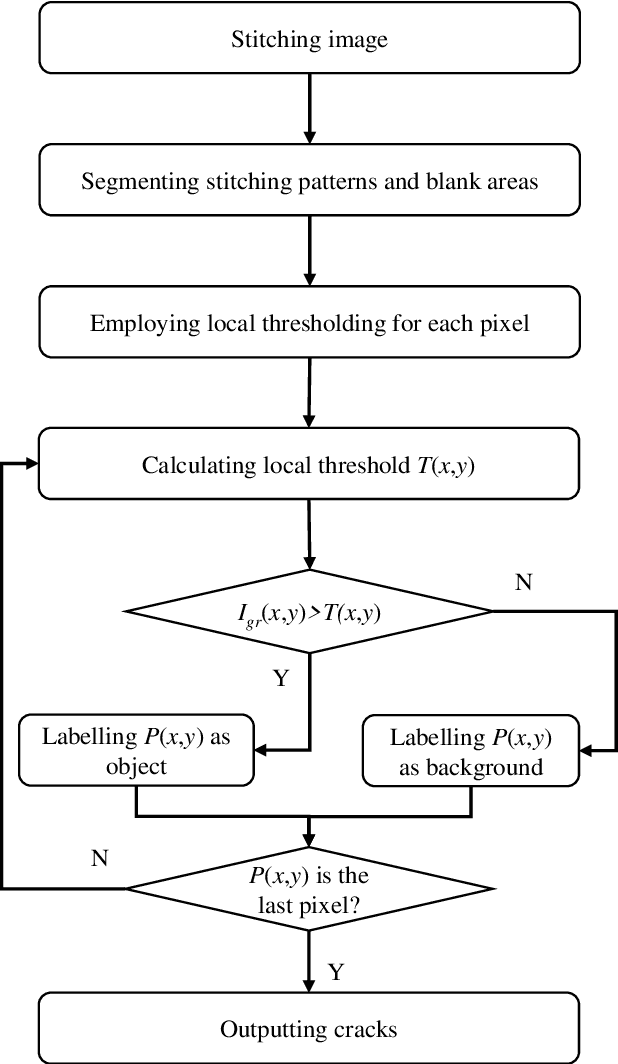

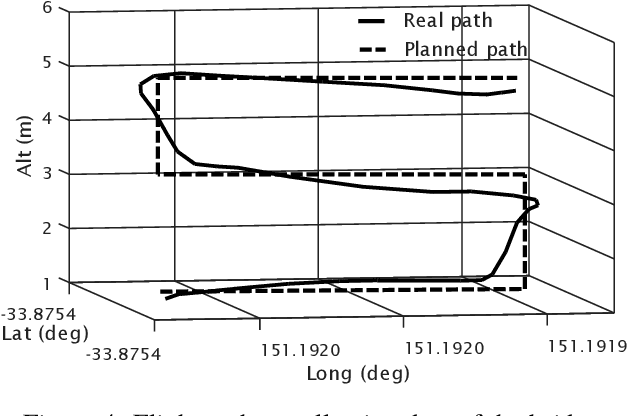
This paper addresses the problem of crack detection which is essential for health monitoring of built infrastructure. Our approach includes two stages, data collection using unmanned aerial vehicles (UAVs) and crack detection using histogram analysis. For the data collection, a 3D model of the structure is first created by using laser scanners. Based on the model, geometric properties are extracted to generate way points necessary for navigating the UAV to take images of the structure. Then, our next step is to stick together those obtained images from the overlapped field of view. The resulting image is then clustered by histogram analysis and peak detection. Potential cracks are finally identified by using locally adaptive thresholds. The whole process is automatically carried out so that the inspection time is significantly improved while safety hazards can be minimised. A prototypical system has been developed for evaluation and experimental results are included.
Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection
Jun 14, 2017
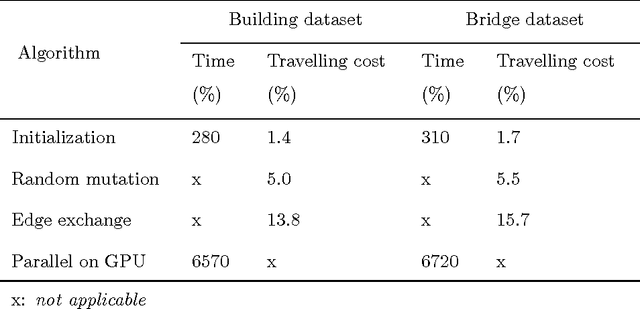
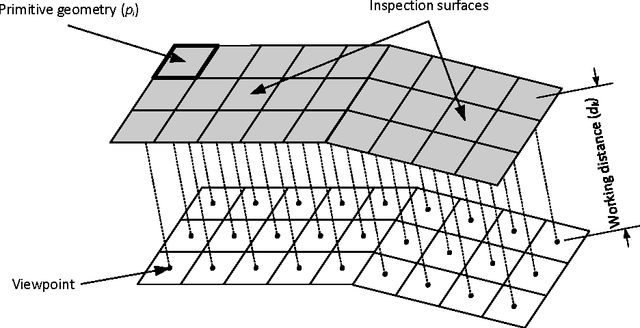
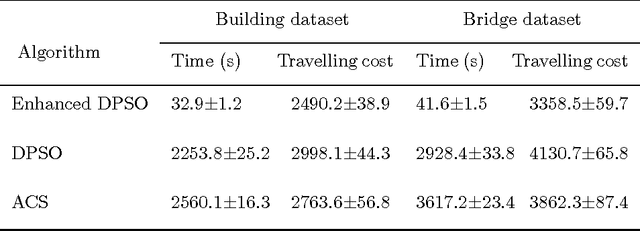
In built infrastructure monitoring, an efficient path planning algorithm is essential for robotic inspection of large surfaces using computer vision. In this work, we first formulate the inspection path planning problem as an extended travelling salesman problem (TSP) in which both the coverage and obstacle avoidance were taken into account. An enhanced discrete particle swarm optimization (DPSO) algorithm is then proposed to solve the TSP, with performance improvement by using deterministic initialization, random mutation, and edge exchange. Finally, we take advantage of parallel computing to implement the DPSO in a GPU-based framework so that the computation time can be significantly reduced while keeping the hardware requirement unchanged. To show the effectiveness of the proposed algorithm, experimental results are included for datasets obtained from UAV inspection of an office building and a bridge.