 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning for a UAV Swarm Using Formation Teaching-Learning-Based Optimization
Paper and Code
Jan 16, 2025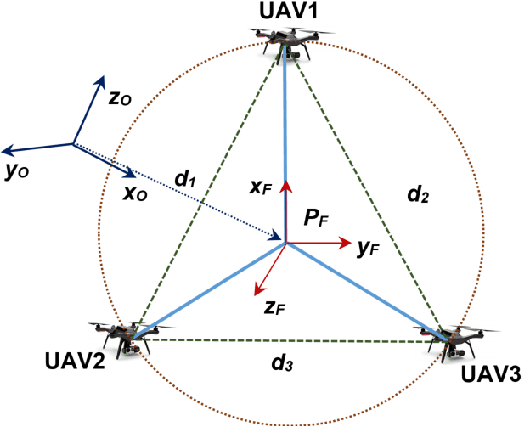

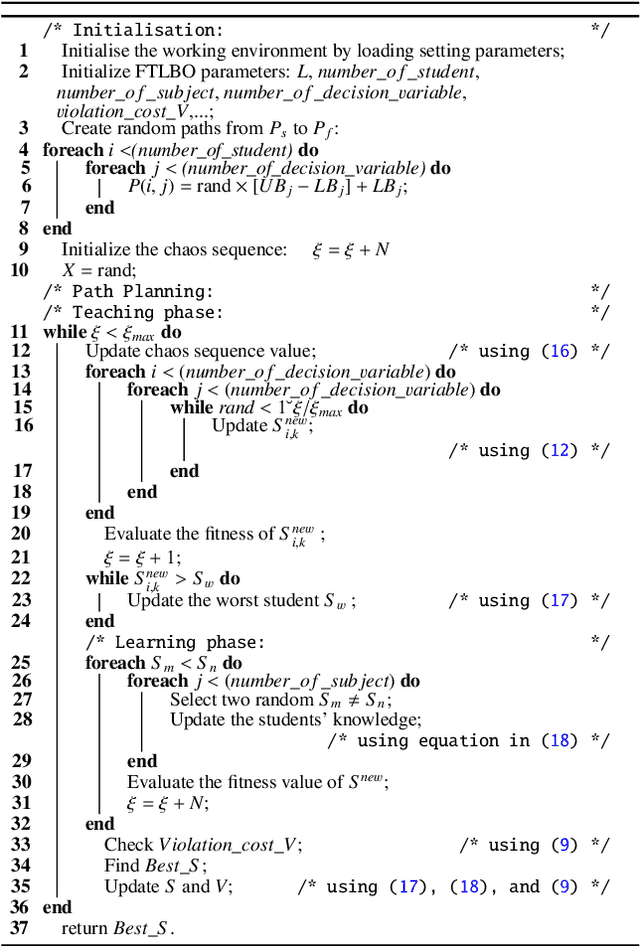
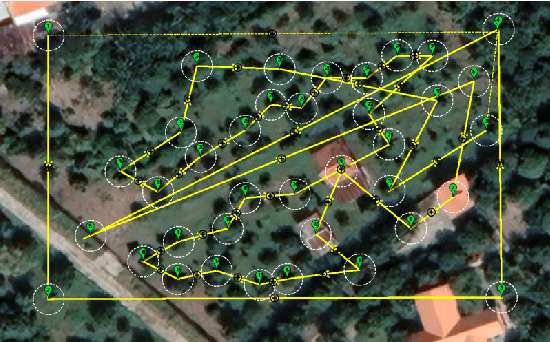
This work addresses the path planning problem for a group of unmanned aerial vehicles (UAVs) to maintain a desired formation during operation. Our approach formulates the problem as an optimization task by defining a set of fitness functions that not only ensure the formation but also include constraints for optimal and safe UAV operation. To optimize the fitness function and obtain a suboptimal path, we employ the teaching-learning-based optimization algorithm and then further enhance it with mechanisms such as mutation, elite strategy, and multi-subject combination. A number of simulations and experiments have been conducted to evaluate the proposed method. The results demonstrate that the algorithm successfully generates valid paths for the UAVs to fly in a triangular formation for an inspection task.