 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable, Proposal-free Instance Segmentation Network for 3D Pixel Clustering and Particle Trajectory Reconstruction in Liquid Argon Time Projection Chambers
Jul 06, 2020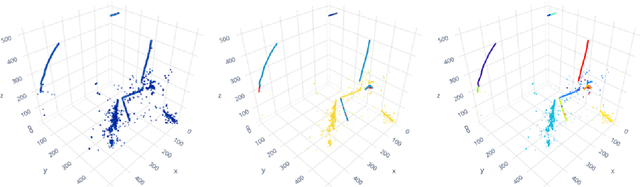
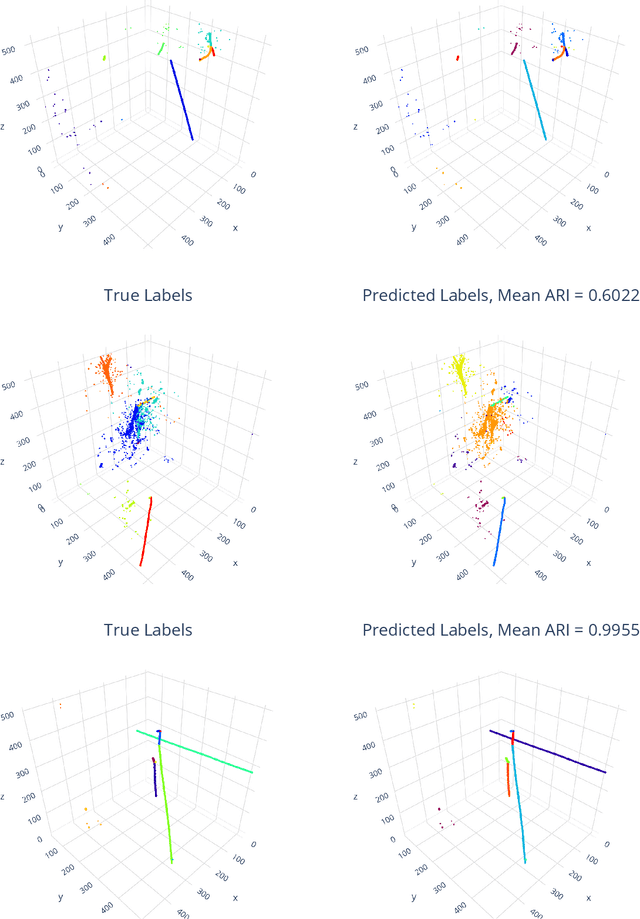
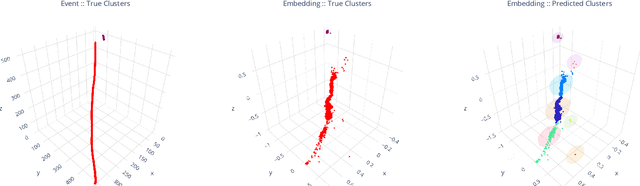
Liquid Argon Time Projection Chambers (LArTPCs) are high resolution particle imaging detectors, employed by accelerator-based neutrino oscillation experiments for high precision physics measurements. While images of particle trajectories are intuitive to analyze for physicists, the development of a high quality, automated data reconstruction chain remains challenging. One of the most critical reconstruction steps is particle clustering: the task of grouping 3D image pixels into different particle instances that share the same particle type. In this paper, we propose the first scalable deep learning algorithm for particle clustering in LArTPC data using sparse convolutional neural networks (SCNN). Building on previous works on SCNNs and proposal free instance segmentation, we build an end-to-end trainable instance segmentation network that learns an embedding of the image pixels to perform point cloud clustering in a transformed space. We benchmark the performance of our algorithm on PILArNet, a public 3D particle imaging dataset, with respect to common clustering evaluation metrics. 3D pixels were successfully clustered into individual particle trajectories with 90% of them having an adjusted Rand index score greater than 92% with a mean pixel clustering efficiency and purity above 96%. This work contributes to the development of an end-to-end optimizable full data reconstruction chain for LArTPCs, in particular pixel-based 3D imaging detectors including the near detector of the Deep Underground Neutrino Experiment. Our algorithm is made available in the open access repository, and we share our Singularity software container, which can be used to reproduce our work on the dataset.
Track Seeding and Labelling with Embedded-space Graph Neural Networks
Jun 30, 2020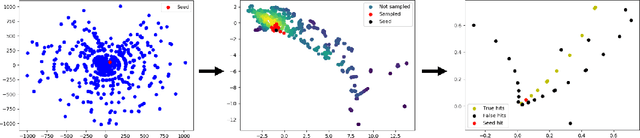
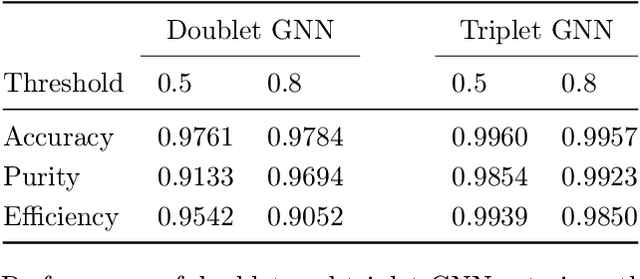

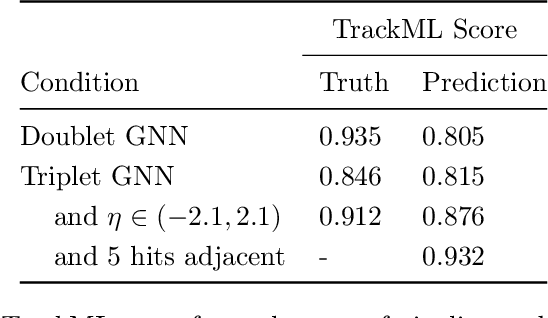
To address the unprecedented scale of HL-LHC data, the Exa.TrkX project is investigating a variety of machine learning approaches to particle track reconstruction. The most promising of these solutions, graph neural networks (GNN), process the event as a graph that connects track measurements (detector hits corresponding to nodes) with candidate line segments between the hits (corresponding to edges). Detector information can be associated with nodes and edges, enabling a GNN to propagate the embedded parameters around the graph and predict node-, edge- and graph-level observables. Previously, message-passing GNNs have shown success in predicting doublet likelihood, and we here report updates on the state-of-the-art architectures for this task. In addition, the Exa.TrkX project has investigated innovations in both graph construction, and embedded representations, in an effort to achieve fully learned end-to-end track finding. Hence, we present a suite of extensions to the original model, with encouraging results for hitgraph classification. In addition, we explore increased performance by constructing graphs from learned representations which contain non-linear metric structure, allowing for efficient clustering and neighborhood queries of data points. We demonstrate how this framework fits in with both traditional clustering pipelines, and GNN approaches. The embedded graphs feed into high-accuracy doublet and triplet classifiers, or can be used as an end-to-end track classifier by clustering in an embedded space. A set of post-processing methods improve performance with knowledge of the detector physics. Finally, we present numerical results on the TrackML particle tracking challenge dataset, where our framework shows favorable results in both seeding and track finding.