 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Proposal Network for Reconstructing 3D Particle Endpoints with Sub-Pixel Precision in Liquid Argon Time Projection Chambers
Jul 10, 2020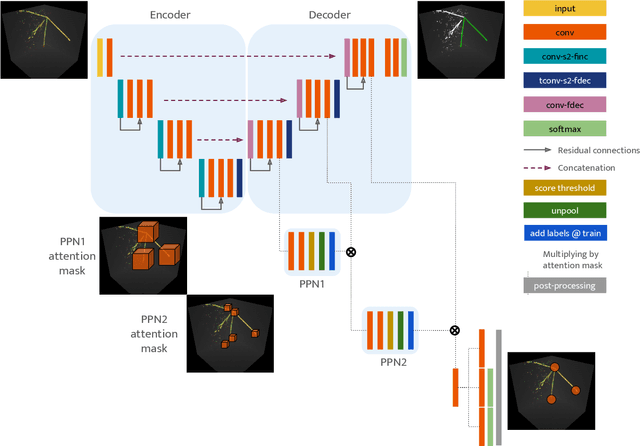
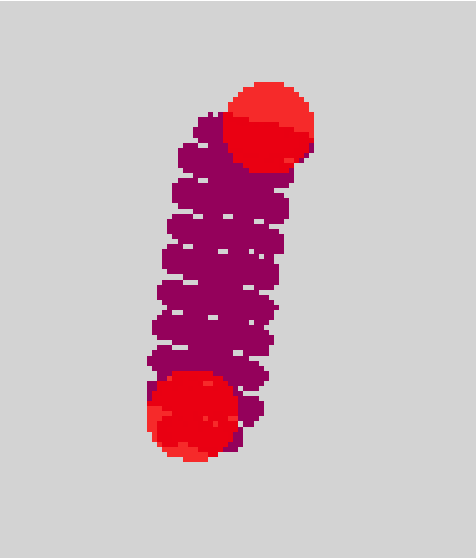
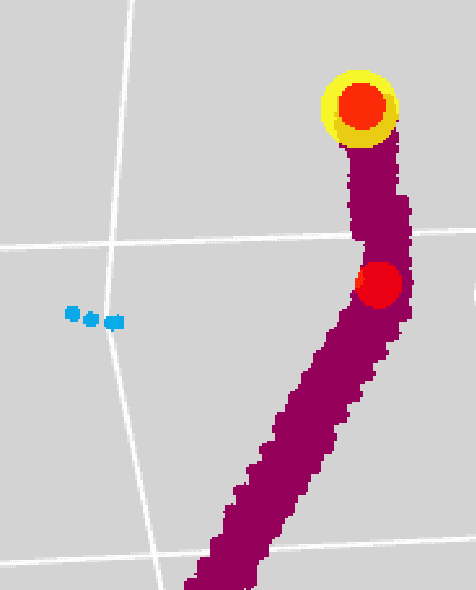
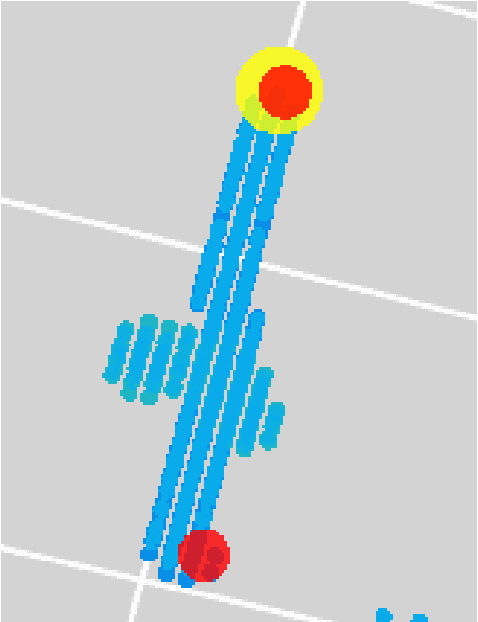
Liquid Argon Time Projection Chambers (LArTPC) are particle imaging detectors recording 2D or 3D images of trajectories of charged particles. Identifying points of interest in these images, namely the initial and terminal points of track-like particle trajectories such as muons and protons, and the initial points of electromagnetic shower-like particle trajectories such as electrons and gamma rays, is a crucial step of identifying and analyzing these particles and impacts the inference of physics signals such as neutrino interaction. The Point Proposal Network is designed to discover these specific points of interest. The algorithm predicts with a sub-voxel precision their spatial location, and also determines the category of the identified points of interest. Using as a benchmark the PILArNet public LArTPC data sample in which the voxel resolution is 3mm/voxel, our algorithm successfully predicted 96.8% and 97.8% of 3D points within a distance of 3 and 10~voxels from the provided true point locations respectively. For the predicted 3D points within 3 voxels of the closest true point locations, the median distance is found to be 0.25 voxels, achieving the sub-voxel level precision. In addition, we report our analysis of the mistakes where our algorithm prediction differs from the provided true point positions by more than 10~voxels. Among 50 mistakes visually scanned, 25 were due to the definition of true position location, 15 were legitimate mistakes where a physicist cannot visually disagree with the algorithm's prediction, and 10 were genuine mistakes that we wish to improve in the future. Further, using these predicted points, we demonstrate a simple algorithm to cluster 3D voxels into individual track-like particle trajectories with a clustering efficiency, purity, and Adjusted Rand Index of 96%, 93%, and 91% respectively.
Scalable, Proposal-free Instance Segmentation Network for 3D Pixel Clustering and Particle Trajectory Reconstruction in Liquid Argon Time Projection Chambers
Jul 06, 2020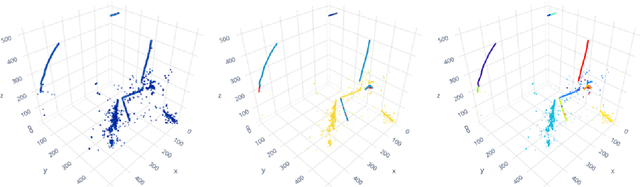
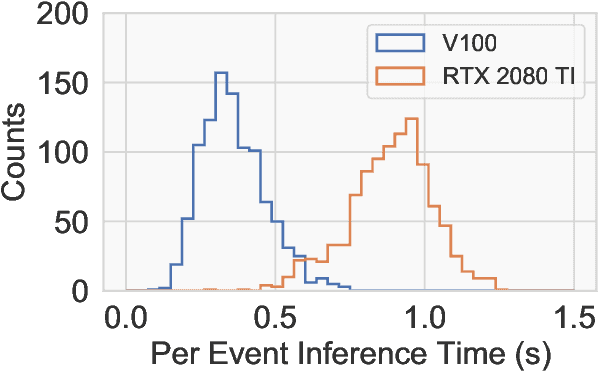
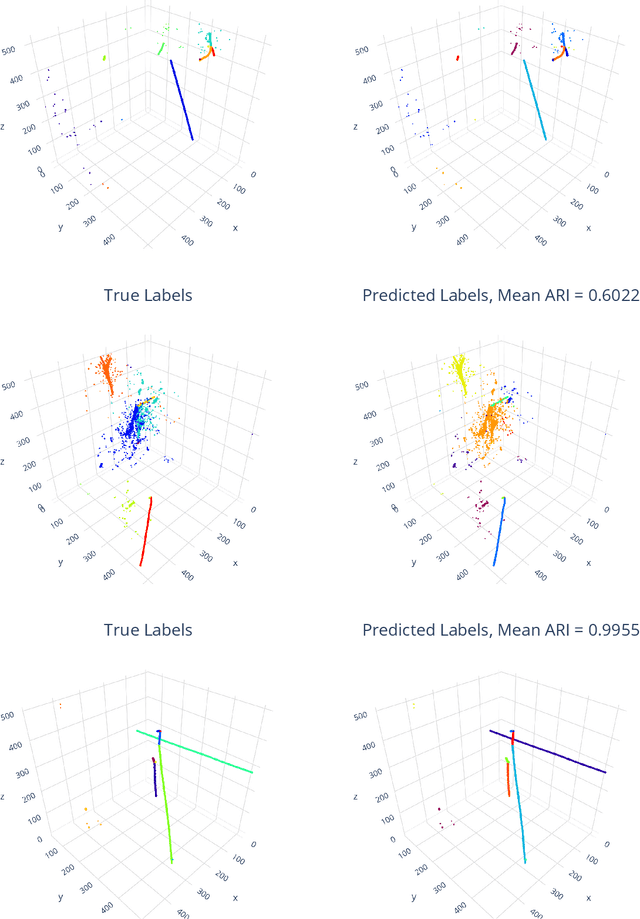
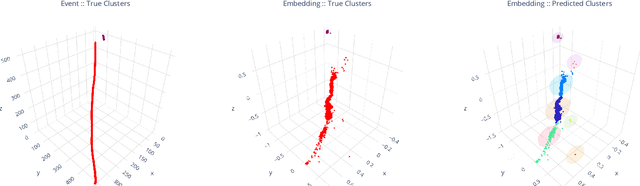
Liquid Argon Time Projection Chambers (LArTPCs) are high resolution particle imaging detectors, employed by accelerator-based neutrino oscillation experiments for high precision physics measurements. While images of particle trajectories are intuitive to analyze for physicists, the development of a high quality, automated data reconstruction chain remains challenging. One of the most critical reconstruction steps is particle clustering: the task of grouping 3D image pixels into different particle instances that share the same particle type. In this paper, we propose the first scalable deep learning algorithm for particle clustering in LArTPC data using sparse convolutional neural networks (SCNN). Building on previous works on SCNNs and proposal free instance segmentation, we build an end-to-end trainable instance segmentation network that learns an embedding of the image pixels to perform point cloud clustering in a transformed space. We benchmark the performance of our algorithm on PILArNet, a public 3D particle imaging dataset, with respect to common clustering evaluation metrics. 3D pixels were successfully clustered into individual particle trajectories with 90% of them having an adjusted Rand index score greater than 92% with a mean pixel clustering efficiency and purity above 96%. This work contributes to the development of an end-to-end optimizable full data reconstruction chain for LArTPCs, in particular pixel-based 3D imaging detectors including the near detector of the Deep Underground Neutrino Experiment. Our algorithm is made available in the open access repository, and we share our Singularity software container, which can be used to reproduce our work on the dataset.
Clustering of Electromagnetic Showers and Particle Interactions with Graph Neural Networks in Liquid Argon Time Projection Chambers Data
Jul 02, 2020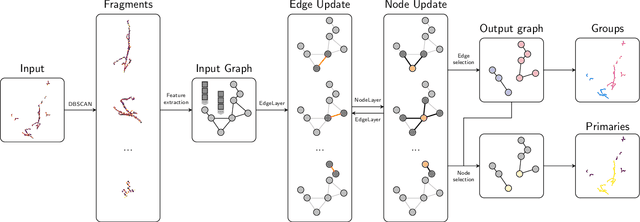
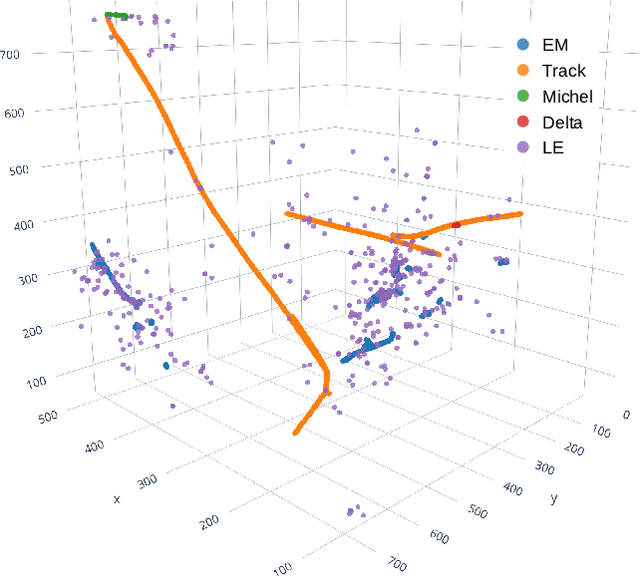
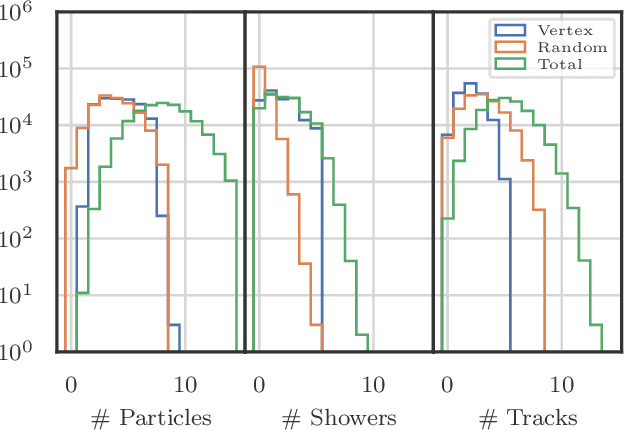
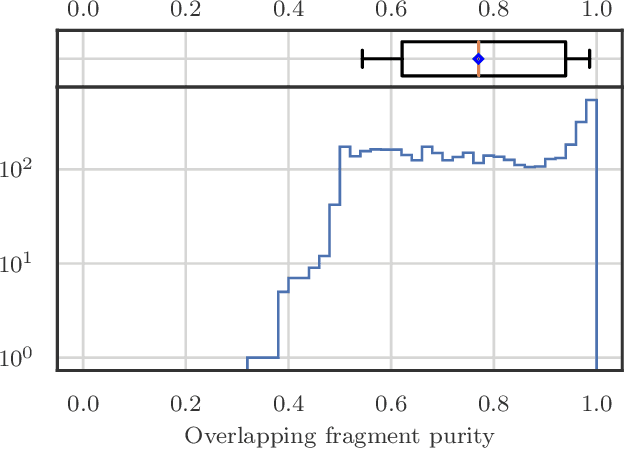
Liquid Argon Time Projection Chambers (LArTPCs) are a class of detectors that produce high resolution images of charged particles within their sensitive volume. In these images, the clustering of distinct particles into superstructures is of central importance to the current and future neutrino physics program. Electromagnetic (EM) activity typically exhibits spatially detached fragments of varying morphology and orientation that are challenging to efficiently assemble using traditional algorithms. Similarly, particles that are spatially removed from each other in the detector may originate from a common interaction. Graph Neural Networks (GNNs) were developed in recent years to find correlations between objects embedded in an arbitrary space. GNNs are first studied with the goal of predicting the adjacency matrix of EM shower fragments and to identify the origin of showers, i.e. primary fragments. On the PILArNet public LArTPC simulation dataset, the algorithm developed in this paper achieves a shower clustering accuracy characterized by a mean adjusted Rand index (ARI) of 97.8 % and a primary identification accuracy of 99.8 %. It yields a relative shower energy resolution of $(4.1+1.4/\sqrt{E (\text{GeV})})\,\%$ and a shower direction resolution of $(2.1/\sqrt{E(\text{GeV})})^{\circ}$. The optimized GNN is then applied to the related task of clustering particle instances into interactions and yields a mean ARI of 99.2 % for an interaction density of $\sim\mathcal{O}(1)\,m^{-3}$.