 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear and Machine Learning Analyses on High-Density EEG data of Math Experts and Novices
Dec 01, 2022Current trend in neurosciences is to use naturalistic stimuli, such as cinema, class-room biology or video gaming, aiming to understand the brain functions during ecologically valid conditions. Naturalistic stimuli recruit complex and overlapping cognitive, emotional and sensory brain processes. Brain oscillations form underlying mechanisms for such processes, and further, these processes can be modified by expertise. Human cortical oscillations are often analyzed with linear methods despite brain as a biological system is highly nonlinear. This study applies a relatively robust nonlinear method, Higuchi fractal dimension (HFD), to classify cortical oscillations of math experts and novices when they solve long and complex math demonstrations in an EEG laboratory. Brain imaging data, which is collected over a long time span during naturalistic stimuli, enables the application of data-driven analyses. Therefore, we also explore the neural signature of math expertise with machine learning algorithms. There is a need for novel methodologies in analyzing naturalistic data because formulation of theories of the brain functions in the real world based on reductionist and simplified study designs is both challenging and questionable. Data-driven intelligent approaches may be helpful in developing and testing new theories on complex brain functions. Our results clarify the different neural signature, analyzed by HFD, of math experts and novices during complex math and suggest machine learning as a promising data-driven approach to understand the brain processes in expertise and mathematical cognition.
Integrated Benchmarking and Design for Reproducible and Accessible Evaluation of Robotic Agents
Sep 09, 2020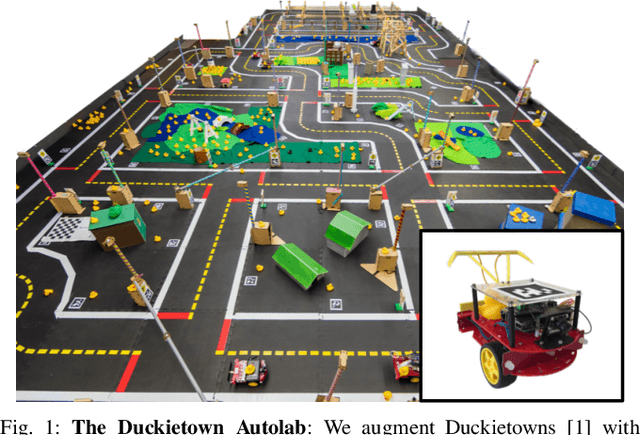
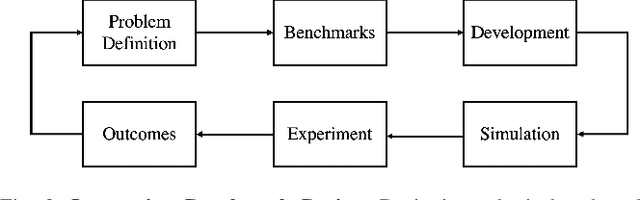
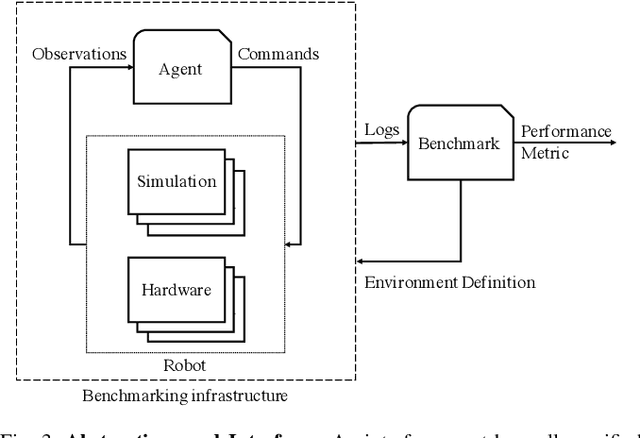
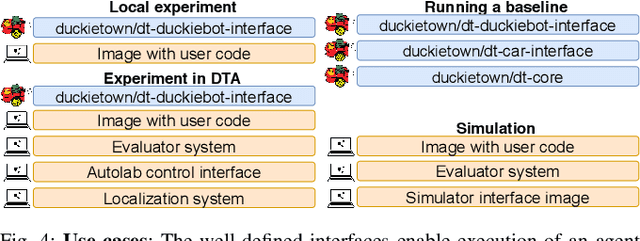
As robotics matures and increases in complexity, it is more necessary than ever that robot autonomy research be reproducible. Compared to other sciences, there are specific challenges to benchmarking autonomy, such as the complexity of the software stacks, the variability of the hardware and the reliance on data-driven techniques, amongst others. In this paper, we describe a new concept for reproducible robotics research that integrates development and benchmarking, so that reproducibility is obtained "by design" from the beginning of the research/development processes. We first provide the overall conceptual objectives to achieve this goal and then a concrete instance that we have built: the DUCKIENet. One of the central components of this setup is the Duckietown Autolab, a remotely accessible standardized setup that is itself also relatively low-cost and reproducible. When evaluating agents, careful definition of interfaces allows users to choose among local versus remote evaluation using simulation, logs, or remote automated hardware setups. We validate the system by analyzing the repeatability of experiments conducted using the infrastructure and show that there is low variance across different robot hardware and across different remote labs.