 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Benchmarking and Design for Reproducible and Accessible Evaluation of Robotic Agents
Sep 09, 2020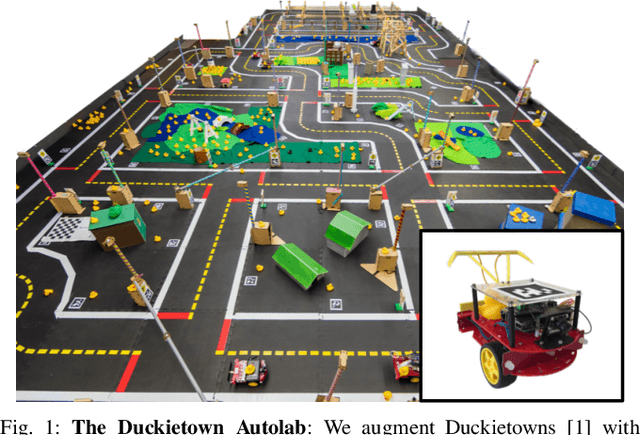
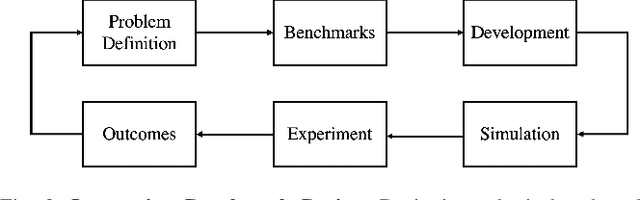
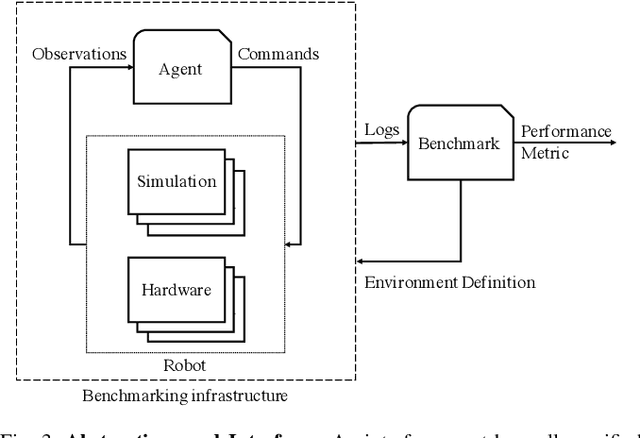
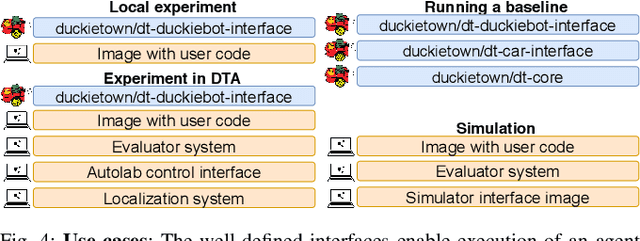
As robotics matures and increases in complexity, it is more necessary than ever that robot autonomy research be reproducible. Compared to other sciences, there are specific challenges to benchmarking autonomy, such as the complexity of the software stacks, the variability of the hardware and the reliance on data-driven techniques, amongst others. In this paper, we describe a new concept for reproducible robotics research that integrates development and benchmarking, so that reproducibility is obtained "by design" from the beginning of the research/development processes. We first provide the overall conceptual objectives to achieve this goal and then a concrete instance that we have built: the DUCKIENet. One of the central components of this setup is the Duckietown Autolab, a remotely accessible standardized setup that is itself also relatively low-cost and reproducible. When evaluating agents, careful definition of interfaces allows users to choose among local versus remote evaluation using simulation, logs, or remote automated hardware setups. We validate the system by analyzing the repeatability of experiments conducted using the infrastructure and show that there is low variance across different robot hardware and across different remote labs.
The AI Driving Olympics at NeurIPS 2018
Mar 06, 2019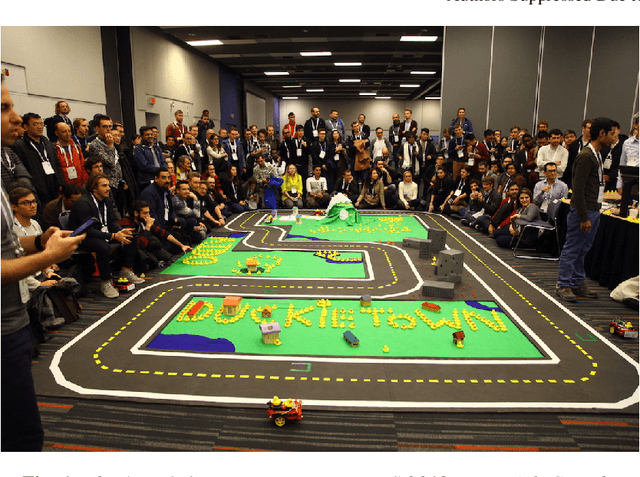
Despite recent breakthroughs, the ability of deep learning and reinforcement learning to outperform traditional approaches to control physically embodied robotic agents remains largely unproven. To help bridge this gap, we created the 'AI Driving Olympics' (AI-DO), a competition with the objective of evaluating the state of the art in machine learning and artificial intelligence for mobile robotics. Based on the simple and well specified autonomous driving and navigation environment called 'Duckietown', AI-DO includes a series of tasks of increasing complexity -- from simple lane-following to fleet management. For each task, we provide tools for competitors to use in the form of simulators, logs, code templates, baseline implementations and low-cost access to robotic hardware. We evaluate submissions in simulation online, on standardized hardware environments, and finally at the competition event. The first AI-DO, AI-DO 1, occurred at the Neural Information Processing Systems (NeurIPS) conference in December 2018. The results of AI-DO 1 highlight the need for better benchmarks, which are lacking in robotics, as well as improved mechanisms to bridge the gap between simulation and reality.