 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTABCF: Counterfactual Explanations for Tabular Data Using a Transformer-Based VAE
Oct 14, 2024In the field of Explainable AI (XAI), counterfactual (CF) explanations are one prominent method to interpret a black-box model by suggesting changes to the input that would alter a prediction. In real-world applications, the input is predominantly in tabular form and comprised of mixed data types and complex feature interdependencies. These unique data characteristics are difficult to model, and we empirically show that they lead to bias towards specific feature types when generating CFs. To overcome this issue, we introduce TABCF, a CF explanation method that leverages a transformer-based Variational Autoencoder (VAE) tailored for modeling tabular data. Our approach uses transformers to learn a continuous latent space and a novel Gumbel-Softmax detokenizer that enables precise categorical reconstruction while preserving end-to-end differentiability. Extensive quantitative evaluation on five financial datasets demonstrates that TABCF does not exhibit bias toward specific feature types, and outperforms existing methods in producing effective CFs that align with common CF desiderata.
WeiPer: OOD Detection using Weight Perturbations of Class Projections
May 28, 2024Recent advances in out-of-distribution (OOD) detection on image data show that pre-trained neural network classifiers can separate in-distribution (ID) from OOD data well, leveraging the class-discriminative ability of the model itself. Methods have been proposed that either use logit information directly or that process the model's penultimate layer activations. With "WeiPer", we introduce perturbations of the class projections in the final fully connected layer which creates a richer representation of the input. We show that this simple trick can improve the OOD detection performance of a variety of methods and additionally propose a distance-based method that leverages the properties of the augmented WeiPer space. We achieve state-of-the-art OOD detection results across multiple benchmarks of the OpenOOD framework, especially pronounced in difficult settings in which OOD samples are positioned close to the training set distribution. We support our findings with theoretical motivations and empirical observations, and run extensive ablations to provide insights into why WeiPer works.
Check News in One Click: NLP-Empowered Pro-Kremlin Propaganda Detection
Jan 28, 2024



Many European citizens become targets of the Kremlin propaganda campaigns, aiming to minimise public support for Ukraine, foster a climate of mistrust and disunity, and shape elections (Meister, 2022). To address this challenge, we developed ''Check News in 1 Click'', the first NLP-empowered pro-Kremlin propaganda detection application available in 7 languages, which provides the lay user with feedback on their news, and explains manipulative linguistic features and keywords. We conducted a user study, analysed user entries and models' behaviour paired with questionnaire answers, and investigated the advantages and disadvantages of the proposed interpretative solution.
PapagAI:Automated Feedback for Reflective Essays
Jul 10, 2023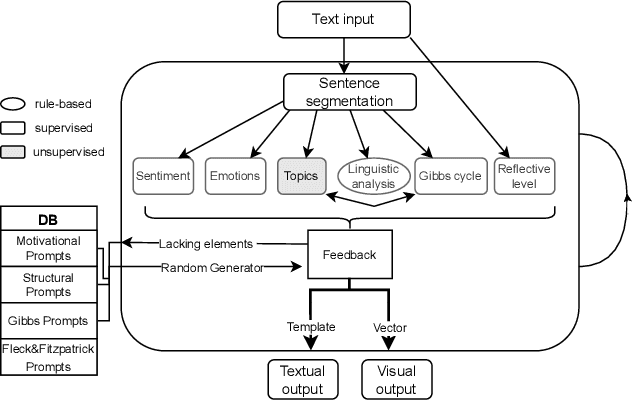



Written reflective practice is a regular exercise pre-service teachers perform during their higher education. Usually, their lecturers are expected to provide individual feedback, which can be a challenging task to perform on a regular basis. In this paper, we present the first open-source automated feedback tool based on didactic theory and implemented as a hybrid AI system. We describe the components and discuss the advantages and disadvantages of our system compared to the state-of-art generative large language models. The main objective of our work is to enable better learning outcomes for students and to complement the teaching activities of lecturers.
Automated multilingual detection of Pro-Kremlin propaganda in newspapers and Telegram posts
Jan 25, 2023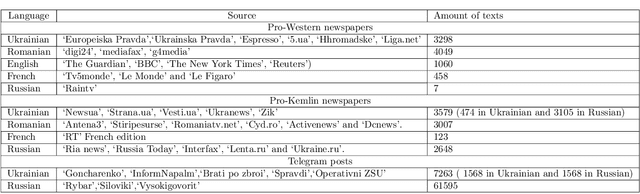
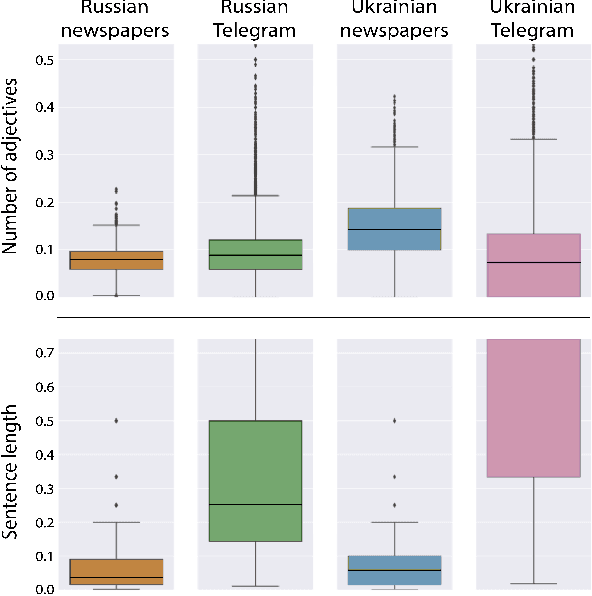

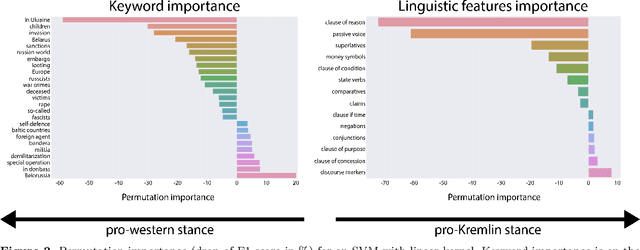
The full-scale conflict between the Russian Federation and Ukraine generated an unprecedented amount of news articles and social media data reflecting opposing ideologies and narratives. These polarized campaigns have led to mutual accusations of misinformation and fake news, shaping an atmosphere of confusion and mistrust for readers worldwide. This study analyses how the media affected and mirrored public opinion during the first month of the war using news articles and Telegram news channels in Ukrainian, Russian, Romanian and English. We propose and compare two methods of multilingual automated pro-Kremlin propaganda identification, based on Transformers and linguistic features. We analyse the advantages and disadvantages of both methods, their adaptability to new genres and languages, and ethical considerations of their usage for content moderation. With this work, we aim to lay the foundation for further development of moderation tools tailored to the current conflict.
A Rigorous Study Of The Deep Taylor Decomposition
Nov 14, 2022Saliency methods attempt to explain deep neural networks by highlighting the most salient features of a sample. Some widely used methods are based on a theoretical framework called Deep Taylor Decomposition (DTD), which formalizes the recursive application of the Taylor Theorem to the network's layers. However, recent work has found these methods to be independent of the network's deeper layers and appear to respond only to lower-level image structure. Here, we investigate the DTD theory to better understand this perplexing behavior and found that the Deep Taylor Decomposition is equivalent to the basic gradient$\times$input method when the Taylor root points (an important parameter of the algorithm chosen by the user) are locally constant. If the root points are locally input-dependent, then one can justify any explanation. In this case, the theory is under-constrained. In an empirical evaluation, we find that DTD roots do not lie in the same linear regions as the input - contrary to a fundamental assumption of the Taylor theorem. The theoretical foundations of DTD were cited as a source of reliability for the explanations. However, our findings urge caution in making such claims.
DNNR: Differential Nearest Neighbors Regression
May 17, 2022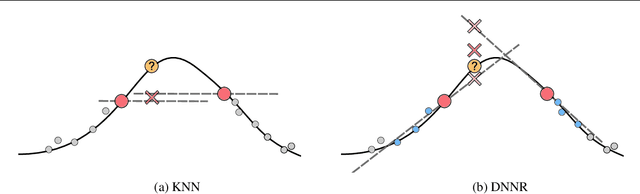
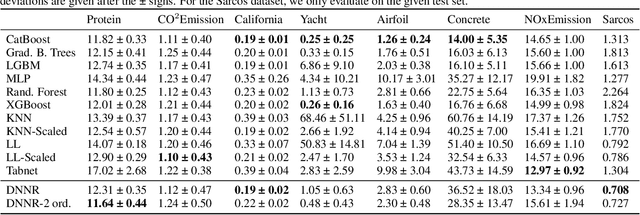
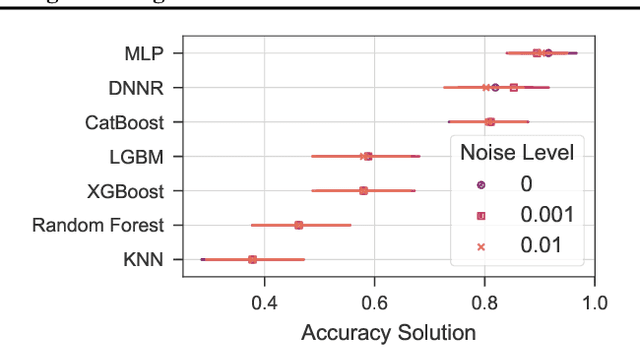
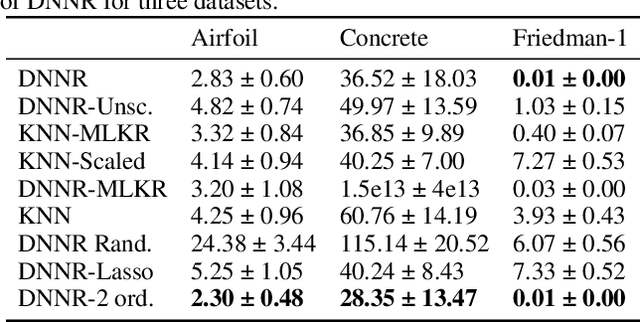
K-nearest neighbors (KNN) is one of the earliest and most established algorithms in machine learning. For regression tasks, KNN averages the targets within a neighborhood which poses a number of challenges: the neighborhood definition is crucial for the predictive performance as neighbors might be selected based on uninformative features, and averaging does not account for how the function changes locally. We propose a novel method called Differential Nearest Neighbors Regression (DNNR) that addresses both issues simultaneously: during training, DNNR estimates local gradients to scale the features; during inference, it performs an n-th order Taylor approximation using estimated gradients. In a large-scale evaluation on over 250 datasets, we find that DNNR performs comparably to state-of-the-art gradient boosting methods and MLPs while maintaining the simplicity and transparency of KNN. This allows us to derive theoretical error bounds and inspect failures. In times that call for transparency of ML models, DNNR provides a good balance between performance and interpretability.
Do Users Benefit From Interpretable Vision? A User Study, Baseline, And Dataset
Apr 25, 2022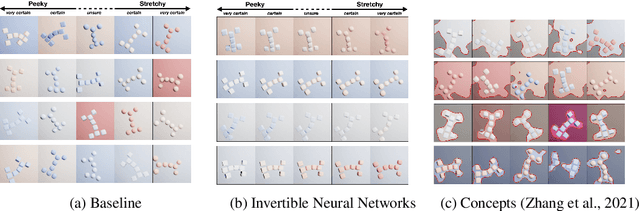
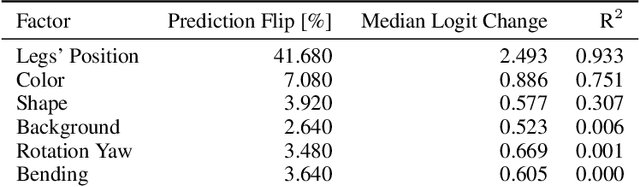
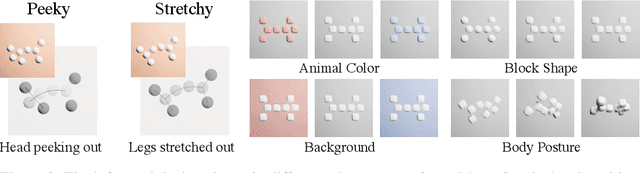

A variety of methods exist to explain image classification models. However, whether they provide any benefit to users over simply comparing various inputs and the model's respective predictions remains unclear. We conducted a user study (N=240) to test how such a baseline explanation technique performs against concept-based and counterfactual explanations. To this end, we contribute a synthetic dataset generator capable of biasing individual attributes and quantifying their relevance to the model. In a study, we assess if participants can identify the relevant set of attributes compared to the ground-truth. Our results show that the baseline outperformed concept-based explanations. Counterfactual explanations from an invertible neural network performed similarly as the baseline. Still, they allowed users to identify some attributes more accurately. Our results highlight the importance of measuring how well users can reason about biases of a model, rather than solely relying on technical evaluations or proxy tasks. We open-source our study and dataset so it can serve as a blue-print for future studies. For code see, https://github.com/berleon/do_users_benefit_from_interpretable_vision
Socially competent robots: adaptation improves leadership performance in groups of live fish
Sep 14, 2020

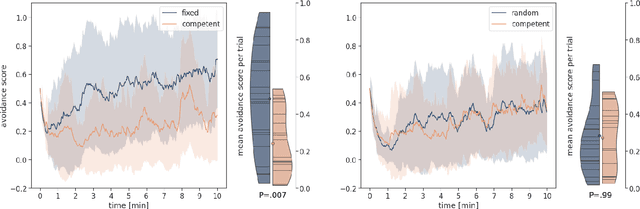

Collective motion is commonly modeled with simple interaction rules between agents. Yet in nature, numerous observables vary within and between individuals and it remains largely unknown how animals respond to this variability, and how much of it may be the result of social responses. Here, we hypothesize that Guppies (\textit{Poecilia reticulata}) respond to avoidance behaviors of their shoal mates and that "socially competent" responses allow them to be more effective leaders. We test this hypothesis in an experimental setting in which a robotic Guppy, called RoboFish, is programmed to adapt to avoidance reactions of its live interaction partner. We compare the leadership performance between socially competent robots and two non-competent control behaviors and find that 1) behavioral variability itself appears attractive and that socially competent robots are better leaders that 2) require fewer approach attempts to 3) elicit longer average following behavior than non-competent agents. This work provides evidence that social responsiveness to avoidance reactions plays a role in the social dynamics of guppies. We showcase how social responsiveness can be modeled and tested directly embedded in a living animal model using adaptive, interactive robots.
Restricting the Flow: Information Bottlenecks for Attribution
Feb 15, 2020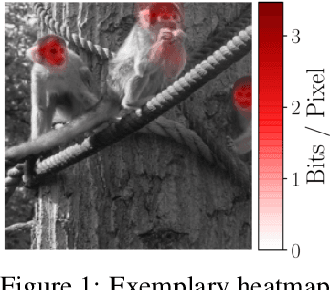
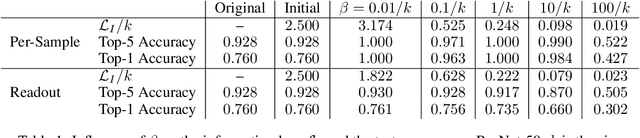
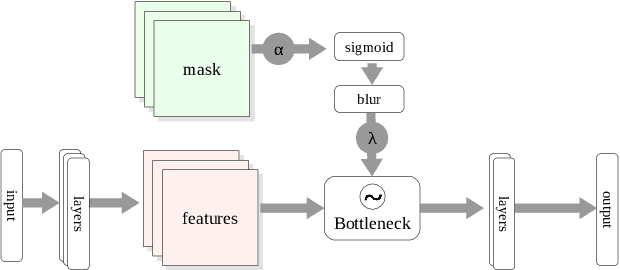
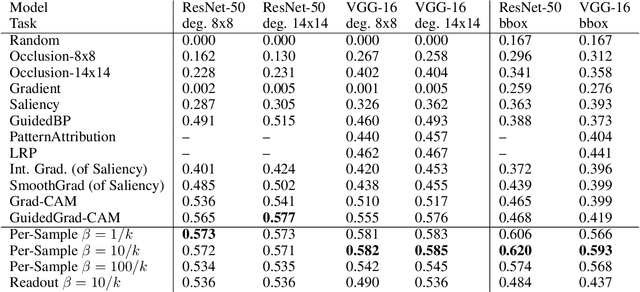
Attribution methods provide insights into the decision-making of machine learning models like artificial neural networks. For a given input sample, they assign a relevance score to each individual input variable, such as the pixels of an image. In this work we adapt the information bottleneck concept for attribution. By adding noise to intermediate feature maps we restrict the flow of information and can quantify (in bits) how much information image regions provide. We compare our method against ten baselines using three different metrics on VGG-16 and ResNet-50, and find that our methods outperform all baselines in five out of six settings. The method's information-theoretic foundation provides an absolute frame of reference for attribution values (bits) and a guarantee that regions scored close to zero are not necessary for the network's decision. For reviews: https://openreview.net/forum?id=S1xWh1rYwB For code: https://github.com/BioroboticsLab/IBA