 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially competent robots: adaptation improves leadership performance in groups of live fish
Sep 14, 2020

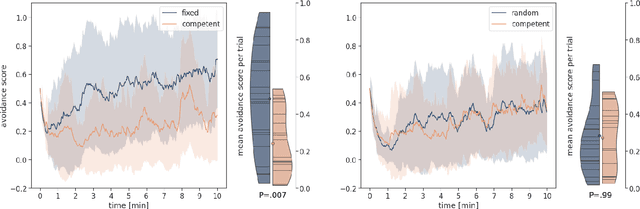

Collective motion is commonly modeled with simple interaction rules between agents. Yet in nature, numerous observables vary within and between individuals and it remains largely unknown how animals respond to this variability, and how much of it may be the result of social responses. Here, we hypothesize that Guppies (\textit{Poecilia reticulata}) respond to avoidance behaviors of their shoal mates and that "socially competent" responses allow them to be more effective leaders. We test this hypothesis in an experimental setting in which a robotic Guppy, called RoboFish, is programmed to adapt to avoidance reactions of its live interaction partner. We compare the leadership performance between socially competent robots and two non-competent control behaviors and find that 1) behavioral variability itself appears attractive and that socially competent robots are better leaders that 2) require fewer approach attempts to 3) elicit longer average following behavior than non-competent agents. This work provides evidence that social responsiveness to avoidance reactions plays a role in the social dynamics of guppies. We showcase how social responsiveness can be modeled and tested directly embedded in a living animal model using adaptive, interactive robots.