 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots that learn to evaluate models of collective behavior
Apr 08, 2026Understanding and modeling animal behavior is essential for studying collective motion, decision-making, and bio-inspired robotics. Yet, evaluating the accuracy of behavioral models still often relies on offline comparisons to static trajectory statistics. Here we introduce a reinforcement-learning-based framework that uses a biomimetic robotic fish (RoboFish) to evaluate computational models of live fish behavior through closed-loop interaction. We trained policies in simulation using four distinct fish models-a simple constant-follow baseline, two rule-based models, and a biologically grounded convolutional neural network model-and transferred these policies to the real RoboFish setup, where they interacted with live fish. Policies were trained to guide a simulated fish to goal locations, enabling us to quantify how the response of real fish differs from the simulated fish's response. We evaluate the fish models by quantifying the sim-to-real gaps, defined as the Wasserstein distance between simulated and real distributions of behavioral metrics such as goal-reaching performance, inter-individual distances, wall interactions, and alignment. The neural network-based fish model exhibited the smallest gap across goal-reaching performance and most other metrics, indicating higher behavioral fidelity than conventional rule-based models under this benchmark. More importantly, this separation shows that the proposed evaluation can quantitatively distinguish candidate models under matched closed-loop conditions. Our work demonstrates how learning-based robotic experiments can uncover deficiencies in behavioral models and provides a general framework for evaluating animal behavior models through embodied interaction.
Watching Swarm Dynamics from Above: A Framework for Advanced Object Tracking in Drone Videos
Jun 11, 2024



Easily accessible sensors, like drones with diverse onboard sensors, have greatly expanded studying animal behavior in natural environments. Yet, analyzing vast, unlabeled video data, often spanning hours, remains a challenge for machine learning, especially in computer vision. Existing approaches often analyze only a few frames. Our focus is on long-term animal behavior analysis. To address this challenge, we utilize classical probabilistic methods for state estimation, such as particle filtering. By incorporating recent advancements in semantic object segmentation, we enable continuous tracking of rapidly evolving object formations, even in scenarios with limited data availability. Particle filters offer a provably optimal algorithmic structure for recursively adding new incoming information. We propose a novel approach for tracking schools of fish in the open ocean from drone videos. Our framework not only performs classical object tracking in 2D, instead it tracks the position and spatial expansion of the fish school in world coordinates by fusing video data and the drone's on board sensor information (GPS and IMU). The presented framework for the first time allows researchers to study collective behavior of fish schools in its natural social and environmental context in a non-invasive and scalable way.
Socially competent robots: adaptation improves leadership performance in groups of live fish
Sep 14, 2020

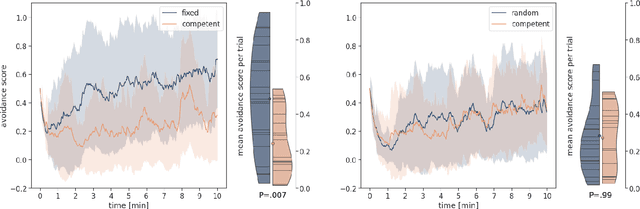

Collective motion is commonly modeled with simple interaction rules between agents. Yet in nature, numerous observables vary within and between individuals and it remains largely unknown how animals respond to this variability, and how much of it may be the result of social responses. Here, we hypothesize that Guppies (\textit{Poecilia reticulata}) respond to avoidance behaviors of their shoal mates and that "socially competent" responses allow them to be more effective leaders. We test this hypothesis in an experimental setting in which a robotic Guppy, called RoboFish, is programmed to adapt to avoidance reactions of its live interaction partner. We compare the leadership performance between socially competent robots and two non-competent control behaviors and find that 1) behavioral variability itself appears attractive and that socially competent robots are better leaders that 2) require fewer approach attempts to 3) elicit longer average following behavior than non-competent agents. This work provides evidence that social responsiveness to avoidance reactions plays a role in the social dynamics of guppies. We showcase how social responsiveness can be modeled and tested directly embedded in a living animal model using adaptive, interactive robots.