 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond the Control Equations: An Artifact Study of Implementation Quality in Robot Control Software
Feb 04, 2026A controller -- a software module managing hardware behavior -- is a key component of a typical robot system. While control theory gives safety guarantees for standard controller designs, the practical implementation of controllers in software introduces complexities that are often overlooked. Controllers are often designed in continuous space, while the software is executed in discrete space, undermining some of the theoretical guarantees. Despite extensive research on control theory and control modeling, little attention has been paid to the implementations of controllers and how their theoretical guarantees are ensured in real-world software systems. We investigate 184 real-world controller implementations in open-source robot software. We examine their application context, the implementation characteristics, and the testing methods employed to ensure correctness. We find that the implementations often handle discretization in an ad hoc manner, leading to potential issues with real-time reliability. Challenges such as timing inconsistencies, lack of proper error handling, and inadequate consideration of real-time constraints further complicate matters. Testing practices are superficial, no systematic verification of theoretical guarantees is used, leaving possible inconsistencies between expected and actual behavior. Our findings highlight the need for improved implementation guidelines and rigorous verification techniques to ensure the reliability and safety of robotic controllers in practice.
Before Autonomy Takes Control: Software Testing in Robotics
Feb 02, 2026Robotic systems are complex and safety-critical software systems. As such, they need to be tested thoroughly. Unfortunately, robot software is intrinsically hard to test compared to traditional software, mainly since the software needs to closely interact with hardware, account for uncertainty in its operational environment, handle disturbances, and act highly autonomously. However, given the large space in which robots operate, anticipating possible failures when designing tests is challenging. This paper presents a mapping study by considering robotics testing papers and relating them to the software testing theory. We consider 247 robotics testing papers and map them to software testing, discussing the state-of-the-art software testing in robotics with an illustrated example, and discuss current challenges. Forming the basis to introduce both the robotics and software engineering communities to software testing challenges. Finally, we identify open questions and lessons learned.
Vibe Coding as a Reconfiguration of Intent Mediation in Software Development: Definition, Implications, and Research Agenda
Jul 29, 2025



Software development is undergoing a fundamental transformation as vibe coding becomes widespread, with large portions of contemporary codebases now being AI-generated. The disconnect between rapid adoption and limited conceptual understanding highlights the need for an inquiry into this emerging paradigm. Drawing on an intent perspective and historical analysis, we define vibe coding as a software development paradigm where humans and generative AI engage in collaborative flow to co-create software artifacts through natural language dialogue, shifting the mediation of developer intent from deterministic instruction to probabilistic inference. By intent mediation, we refer to the fundamental process through which developers translate their conceptual goals into representations that computational systems can execute. Our results show that vibe coding reconfigures cognitive work by redistributing epistemic labor between humans and machines, shifting the expertise in the software development process away from traditional areas such as design or technical implementation toward collaborative orchestration. We identify key opportunities, including democratization, acceleration, and systemic leverage, alongside risks, such as black box codebases, responsibility gaps, and ecosystem bias. We conclude with a research agenda spanning human-, technology-, and organization-centered directions to guide future investigations of this paradigm.
A Large-Scale Study of Model Integration in ML-Enabled Software Systems
Aug 12, 2024



The rise of machine learning (ML) and its embedding in systems has drastically changed the engineering of software-intensive systems. Traditionally, software engineering focuses on manually created artifacts such as source code and the process of creating them, as well as best practices for integrating them, i.e., software architectures. In contrast, the development of ML artifacts, i.e. ML models, comes from data science and focuses on the ML models and their training data. However, to deliver value to end users, these ML models must be embedded in traditional software, often forming complex topologies. In fact, ML-enabled software can easily incorporate many different ML models. While the challenges and practices of building ML-enabled systems have been studied to some extent, beyond isolated examples, little is known about the characteristics of real-world ML-enabled systems. Properly embedding ML models in systems so that they can be easily maintained or reused is far from trivial. We need to improve our empirical understanding of such systems, which we address by presenting the first large-scale study of real ML-enabled software systems, covering over 2,928 open source systems on GitHub. We classified and analyzed them to determine their characteristics, as well as their practices for reusing ML models and related code, and the architecture of these systems. Our findings provide practitioners and researchers with insight into practices for embedding and integrating ML models, bringing data science and software engineering closer together.
Runtime Verification and Field Testing for ROS-Based Robotic Systems
Apr 17, 2024



Robotic systems are becoming pervasive and adopted in increasingly many domains, such as manufacturing, healthcare, and space exploration. To this end, engineering software has emerged as a crucial discipline for building maintainable and reusable robotic systems. Robotics software engineering research has received increasing attention, fostering autonomy as a fundamental goal. However, robotics developers are still challenged trying to achieve this goal given that simulation is not able to deliver solutions to realistically emulate real-world phenomena. Robots also need to operate in unpredictable and uncontrollable environments, which require safe and trustworthy self-adaptation capabilities implemented in software. Typical techniques to address the challenges are runtime verification, field-based testing, and mitigation techniques that enable fail-safe solutions. However, there is no clear guidance to architect ROS-based systems to enable and facilitate runtime verification and field-based testing. This paper aims to fill in this gap by providing guidelines that can help developers and QA teams when developing, verifying or testing their robots in the field. These guidelines are carefully tailored to address the challenges and requirements of testing robotics systems in real-world scenarios. We conducted a literature review on studies addressing runtime verification and field-based testing for robotic systems, mined ROS-based application repositories, and validated the applicability, clarity, and usefulness via two questionnaires with 55 answers. We contribute 20 guidelines formulated for researchers and practitioners in robotic software engineering. Finally, we map our guidelines to open challenges thus far in runtime verification and field-based testing for ROS-based systems and, we outline promising research directions in the field.
Software Reconfiguration in Robotics
Oct 02, 2023Since it has often been claimed by academics that reconfiguration is essential, many approaches to reconfiguration, especially of robotic systems, have been developed. Accordingly, the literature on robotics is rich in techniques for reconfiguring robotic systems. However, when talking to researchers in the domain, there seems to be no common understanding of what exactly reconfiguration is and how it relates to other concepts such as adaptation. Beyond this academic perspective, robotics frameworks provide mechanisms for dynamically loading and unloading parts of robotics applications. While we have a fuzzy picture of the state-of-the-art in robotic reconfiguration from an academic perspective, we lack a picture of the state-of-practice from a practitioner perspective. To fill this gap, we survey the literature on reconfiguration in robotic systems by identifying and analyzing 98 relevant papers, review how four major robotics frameworks support reconfiguration, and finally investigate the realization of reconfiguration in 48 robotics applications. When comparing the state-of-the-art with the state-of-practice, we observed a significant discrepancy between them, in particular, the scientific community focuses on complex structural reconfiguration, while in practice only parameter reconfiguration is widely used. Based on our observations, we discuss possible reasons for this discrepancy and conclude with a takeaway message for academics and practitioners interested in robotics.
Behavior Trees and State Machines in Robotics Applications
Aug 08, 2022



Autonomous robots combine a variety of skills to form increasingly complex behaviors called missions. While the skills are often programmed at a relatively low level of abstraction, their coordination is architecturally separated and often expressed in higher-level languages or frameworks. State Machines have been the go-to modeling language for decades, but recently, the language of Behavior Trees gained attention among roboticists. Originally designed for computer games to model autonomous actors, Behavior Trees offer an extensible tree-based representation of missions and are praised for supporting modular design and reuse of code. However, even though, several implementations of the language are in use, little is known about its usage and scope in the real world. How do concepts offered by behavior trees relate to traditional languages, such as state machines? How are behavior tree and state machine concepts used in applications? We present a study of the key language concepts in Behavior Trees and their use in real-world robotic applications. We identify behavior tree languages and compare their semantics to the most well-known behavior modeling language in robotics: state machines. We mine open-source repositories for robotics applications that use the languages and analyze this usage. We find similarity aspects between the two behavior modeling languages in terms of language design and their usage in open-source projects to accommodate the need of robotic domain. We contribute a dataset of real-world behavior models, hoping to inspire the community to use and further develop this language, associated tools, and analysis techniques.
A Driver-Vehicle Model for ADS Scenario-based Testing
May 05, 2022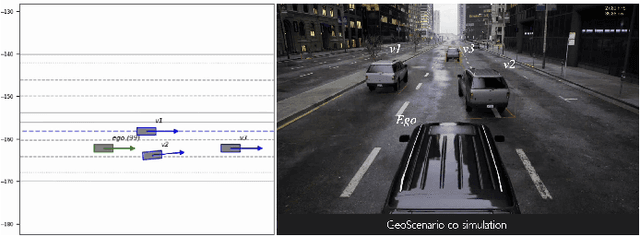
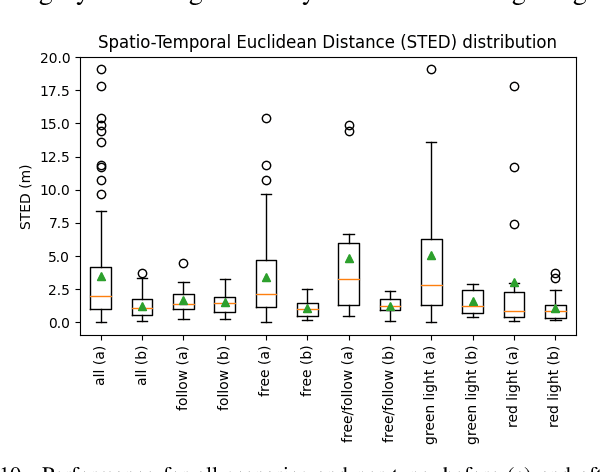
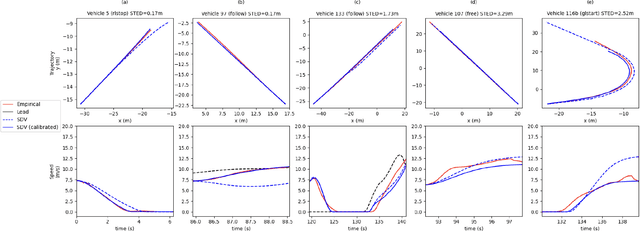
Scenario-based testing for automated driving systems (ADS) must be able to simulate traffic scenarios that rely on interactions with other vehicles. Although many languages for high-level scenario modelling have been proposed, they lack the features to precisely and reliably control the required micro-simulation, while also supporting behavior reuse and test reproducibility for a wide range of interactive scenarios. To fill this gap between scenario design and execution, we propose the Simulated Driver-Vehicle Model (SDV) to represent and simulate vehicles as dynamic entities with their behavior being constrained by scenario design and goals set by testers. The model combines driver and vehicle as a single entity. It is based on human-like driving and the mechanical limitations of real vehicles for realistic simulation. The layered architecture of the model leverages behavior trees to express high-level behaviors in terms of lower-level maneuvers, affording multiple driving styles and reuse. Further, optimization-based maneuver planner guides the simulated vehicles towards the desired behavior. Our extensive evaluation shows the model's design effectiveness using NHTSA pre-crash scenarios, its motion realism in comparison to naturalistic urban traffic, and its scalability with traffic density. Finally, we show the applicability of SDV model to test a real ADS and to identify crash scenarios, which are impractical to represent using predefined vehicle trajectories. The SDV model instances can be injected into existing simulation environments via co-simulation.
Behavior Trees in Action: A Study of Robotics Applications
Oct 13, 2020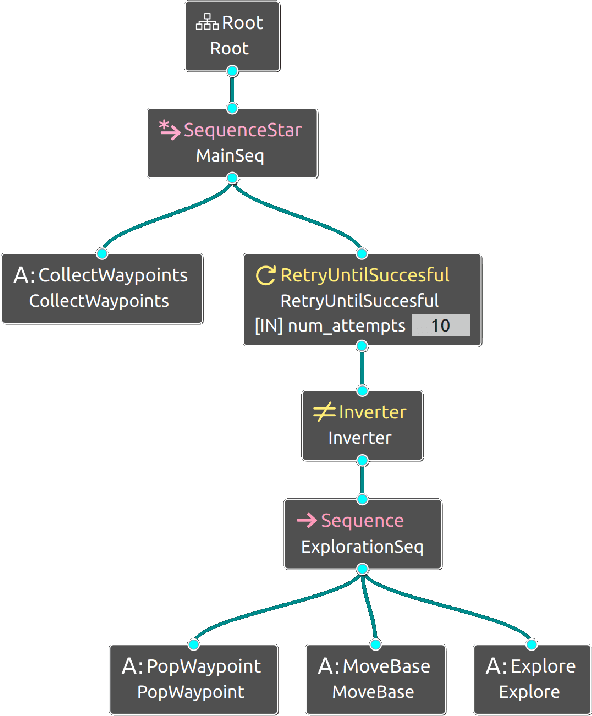
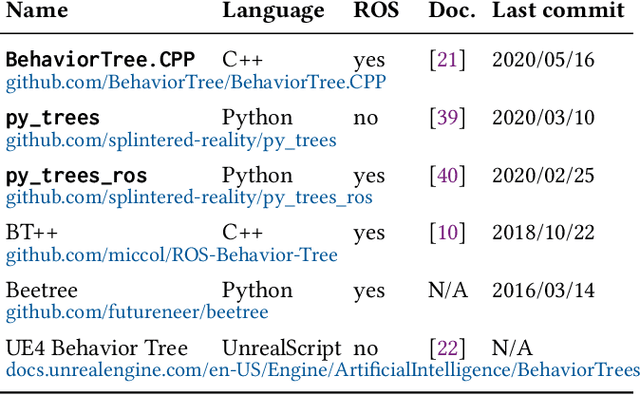
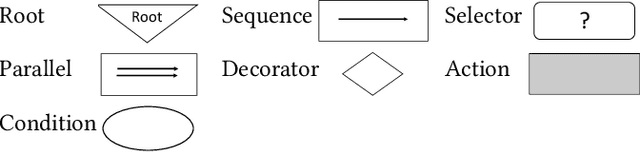
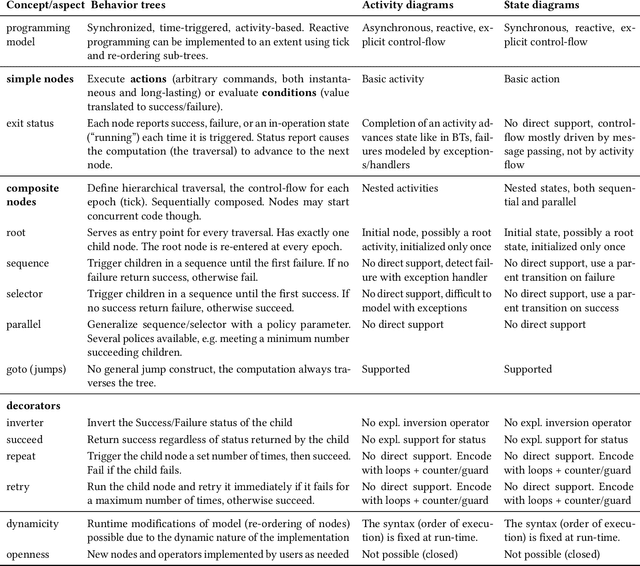
Autonomous robots combine a variety of skills to form increasingly complex behaviors called missions. While the skills are often programmed at a relatively low level of abstraction, their coordination is architecturally separated and often expressed in higher-level languages or frameworks. Recently, the language of Behavior Trees gained attention among roboticists for this reason. Originally designed for computer games to model autonomous actors, Behavior Trees offer an extensible tree-based representation of missions. However, even though, several implementations of the language are in use, little is known about its usage and scope in the real world. How do behavior trees relate to traditional languages for describing behavior? How are behavior tree concepts used in applications? What are the benefits of using them? We present a study of the key language concepts in Behavior Trees and their use in real-world robotic applications. We identify behavior tree languages and compare their semantics to the most well-known behavior modeling languages: state and activity diagrams. We mine open source repositories for robotics applications that use the language and analyze this usage. We find that Behavior Trees are a pragmatic language, not fully specified, allowing projects to extend it even for just one model. Behavior trees clearly resemble the models-at-runtime paradigm. We contribute a dataset of real-world behavior models, hoping to inspire the community to use and further develop this language, associated tools, and analysis techniques.
Robotics Software Engineering: A Perspective from the Service Robotics Domain
Jul 07, 2020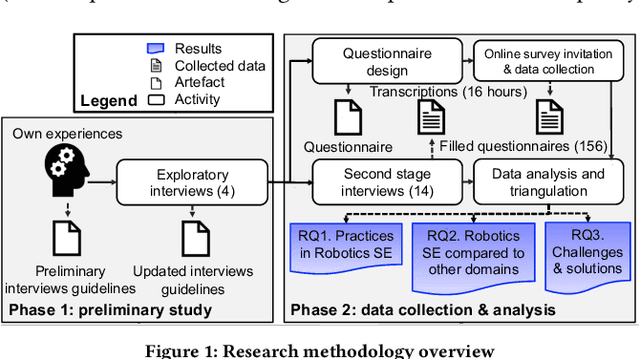
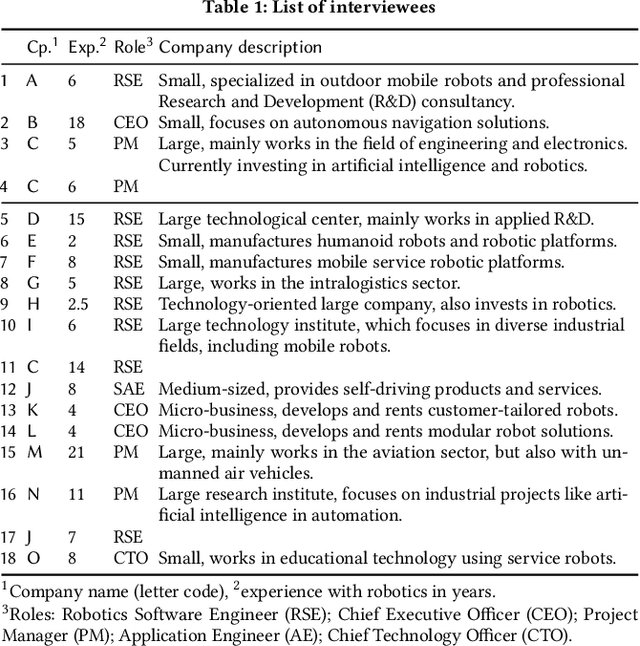
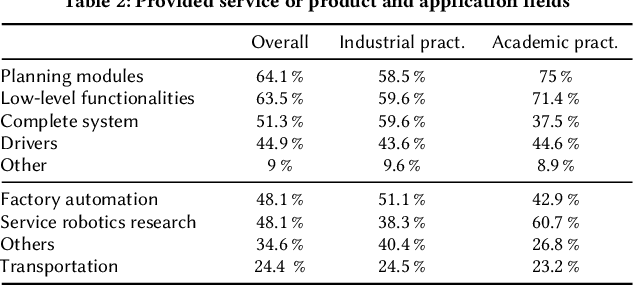
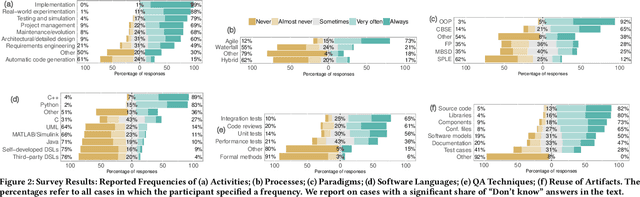
Robots that support humans by performing useful tasks (a.k.a., service robots) are booming worldwide. In contrast to industrial robots, the development of service robots comes with severe software engineering challenges, since they require high levels of robustness and autonomy to operate in highly heterogeneous environments. As a domain with critical safety implications, service robotics faces a need for sound software development practices. In this paper, we present the first large-scale empirical study to assess the state of the art and practice of robotics software engineering. We conducted 18 semi-structured interviews with industrial practitioners working in 15 companies from 9 different countries and a survey with 156 respondents (from 26 countries) from the robotics domain. Our results provide a comprehensive picture of (i) the practices applied by robotics industrial and academic practitioners, including processes, paradigms, languages, tools, frameworks, and reuse practices, (ii) the distinguishing characteristics of robotics software engineering, and (iii) recurrent challenges usually faced, together with adopted solutions. The paper concludes by discussing observations, derived hypotheses, and proposed actions for researchers and practitioners.