 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Driver-Vehicle Model for ADS Scenario-based Testing
May 05, 2022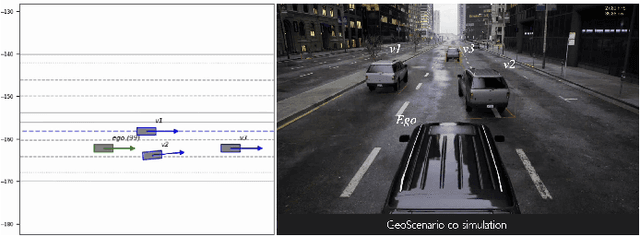
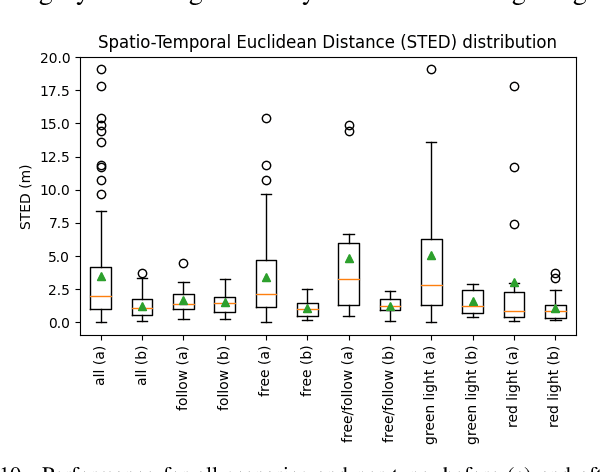
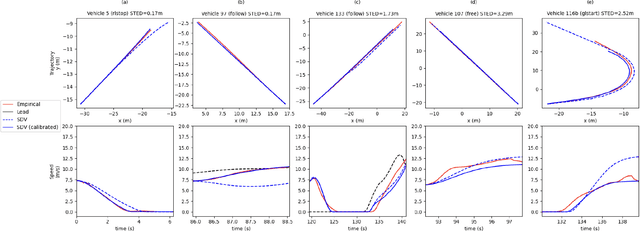
Scenario-based testing for automated driving systems (ADS) must be able to simulate traffic scenarios that rely on interactions with other vehicles. Although many languages for high-level scenario modelling have been proposed, they lack the features to precisely and reliably control the required micro-simulation, while also supporting behavior reuse and test reproducibility for a wide range of interactive scenarios. To fill this gap between scenario design and execution, we propose the Simulated Driver-Vehicle Model (SDV) to represent and simulate vehicles as dynamic entities with their behavior being constrained by scenario design and goals set by testers. The model combines driver and vehicle as a single entity. It is based on human-like driving and the mechanical limitations of real vehicles for realistic simulation. The layered architecture of the model leverages behavior trees to express high-level behaviors in terms of lower-level maneuvers, affording multiple driving styles and reuse. Further, optimization-based maneuver planner guides the simulated vehicles towards the desired behavior. Our extensive evaluation shows the model's design effectiveness using NHTSA pre-crash scenarios, its motion realism in comparison to naturalistic urban traffic, and its scalability with traffic density. Finally, we show the applicability of SDV model to test a real ADS and to identify crash scenarios, which are impractical to represent using predefined vehicle trajectories. The SDV model instances can be injected into existing simulation environments via co-simulation.
Robotics Software Engineering: A Perspective from the Service Robotics Domain
Jul 07, 2020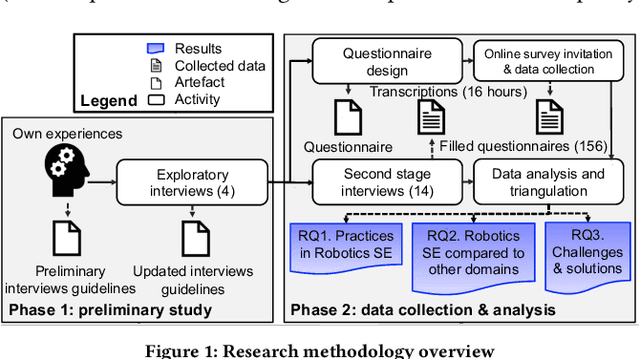
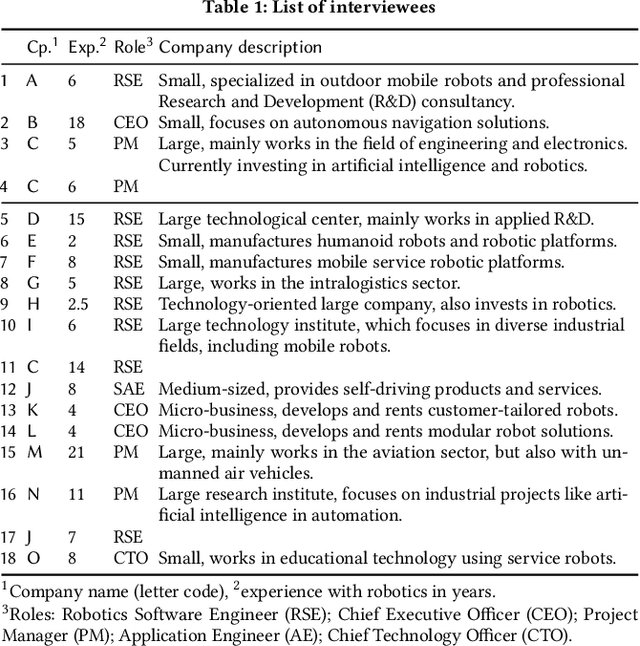
Robots that support humans by performing useful tasks (a.k.a., service robots) are booming worldwide. In contrast to industrial robots, the development of service robots comes with severe software engineering challenges, since they require high levels of robustness and autonomy to operate in highly heterogeneous environments. As a domain with critical safety implications, service robotics faces a need for sound software development practices. In this paper, we present the first large-scale empirical study to assess the state of the art and practice of robotics software engineering. We conducted 18 semi-structured interviews with industrial practitioners working in 15 companies from 9 different countries and a survey with 156 respondents (from 26 countries) from the robotics domain. Our results provide a comprehensive picture of (i) the practices applied by robotics industrial and academic practitioners, including processes, paradigms, languages, tools, frameworks, and reuse practices, (ii) the distinguishing characteristics of robotics software engineering, and (iii) recurrent challenges usually faced, together with adopted solutions. The paper concludes by discussing observations, derived hypotheses, and proposed actions for researchers and practitioners.