 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Pedestrian Behavior Model to Generate Realistic Human Behavior in Traffic Simulation
Jun 01, 2022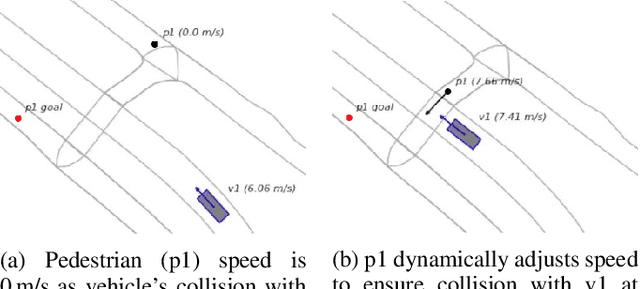
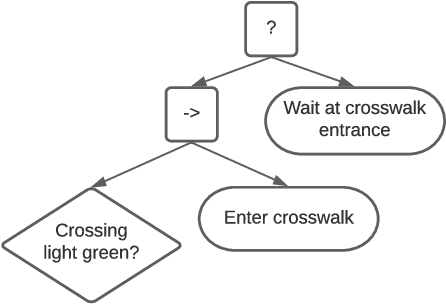
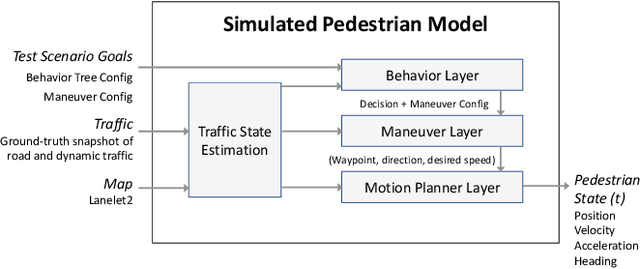
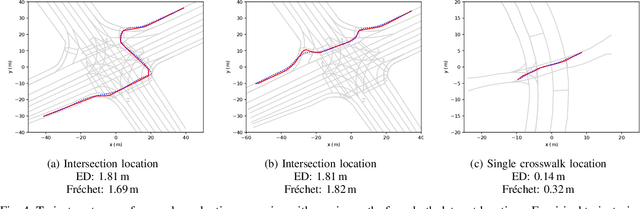
Modelling pedestrian behavior is crucial in the development and testing of autonomous vehicles. In this work, we present a hierarchical pedestrian behavior model that generates high-level decisions through the use of behavior trees, in order to produce maneuvers executed by a low-level motion planner using an adapted Social Force model. A full implementation of our work is integrated into GeoScenario Server, a scenario definition and execution engine, extending its vehicle simulation capabilities with pedestrian simulation. The extended environment allows simulating test scenarios involving both vehicles and pedestrians to assist in the scenario-based testing process of autonomous vehicles. The presented hierarchical model is evaluated on two real-world data sets collected at separate locations with different road structures. Our model is shown to replicate the real-world pedestrians' trajectories with a high degree of fidelity and a decision-making accuracy of 98% or better, given only high-level routing information for each pedestrian.
A Driver-Vehicle Model for ADS Scenario-based Testing
May 05, 2022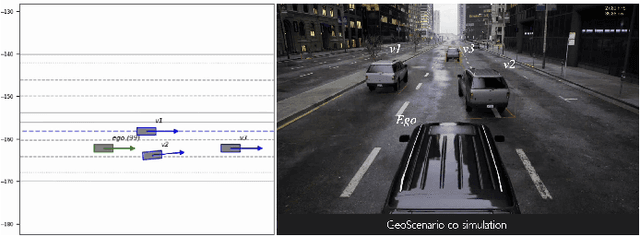
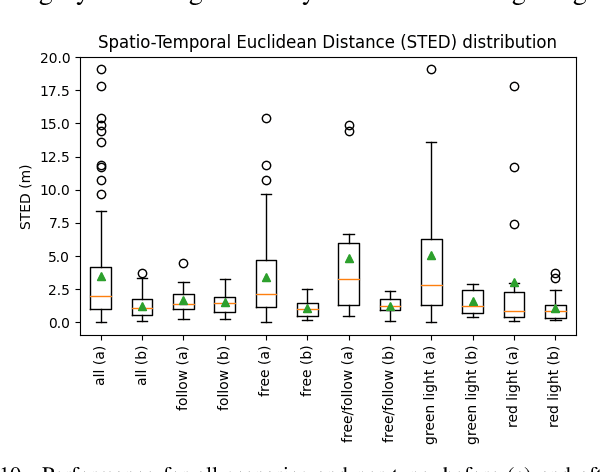
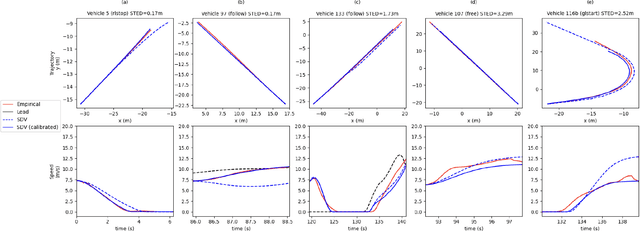
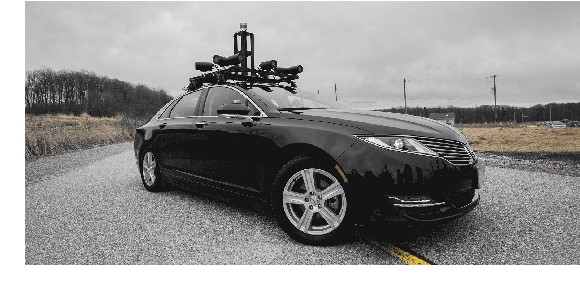
Scenario-based testing for automated driving systems (ADS) must be able to simulate traffic scenarios that rely on interactions with other vehicles. Although many languages for high-level scenario modelling have been proposed, they lack the features to precisely and reliably control the required micro-simulation, while also supporting behavior reuse and test reproducibility for a wide range of interactive scenarios. To fill this gap between scenario design and execution, we propose the Simulated Driver-Vehicle Model (SDV) to represent and simulate vehicles as dynamic entities with their behavior being constrained by scenario design and goals set by testers. The model combines driver and vehicle as a single entity. It is based on human-like driving and the mechanical limitations of real vehicles for realistic simulation. The layered architecture of the model leverages behavior trees to express high-level behaviors in terms of lower-level maneuvers, affording multiple driving styles and reuse. Further, optimization-based maneuver planner guides the simulated vehicles towards the desired behavior. Our extensive evaluation shows the model's design effectiveness using NHTSA pre-crash scenarios, its motion realism in comparison to naturalistic urban traffic, and its scalability with traffic density. Finally, we show the applicability of SDV model to test a real ADS and to identify crash scenarios, which are impractical to represent using predefined vehicle trajectories. The SDV model instances can be injected into existing simulation environments via co-simulation.
An Analysis of ISO 26262: Using Machine Learning Safely in Automotive Software
Sep 07, 2017


Machine learning (ML) plays an ever-increasing role in advanced automotive functionality for driver assistance and autonomous operation; however, its adequacy from the perspective of safety certification remains controversial. In this paper, we analyze the impacts that the use of ML as an implementation approach has on ISO 26262 safety lifecycle and ask what could be done to address them. We then provide a set of recommendations on how to adapt the standard to accommodate ML.