 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging LLMs to support co-evolution between definitions and instances of textual DSLs: A Systematic Evaluation
Feb 12, 2026Software languages evolve over time for reasons such as feature additions. When grammars evolve, textual instances that originally conformed to them may become outdated. While model-driven engineering provides many techniques for co-evolving models with metamodel changes, these approaches are not designed for textual DSLs and may lose human-relevant information such as layout and comments. This study systematically evaluates the potential of large language models (LLMs) for co-evolving grammars and instances of textual DSLs. Using Claude Sonnet 4.5 and GPT-5.2 across ten case languages with ten runs each, we assess both correctness and preservation of human-oriented information. Results show strong performance on small-scale cases ($\geq$94% precision and recall for instances requiring fewer than 20 modified lines), but performance degraded with scale: Claude maintains 85% recall at 40 lines, while GPT fails on the largest instances. Response time increases substantially with instance size, and grammar evolution complexity and deletion granularity affect performance more than change type. These findings clarify when LLM-based co-evolution is effective and where current limitations remain.
Software Reconfiguration in Robotics
Oct 02, 2023Since it has often been claimed by academics that reconfiguration is essential, many approaches to reconfiguration, especially of robotic systems, have been developed. Accordingly, the literature on robotics is rich in techniques for reconfiguring robotic systems. However, when talking to researchers in the domain, there seems to be no common understanding of what exactly reconfiguration is and how it relates to other concepts such as adaptation. Beyond this academic perspective, robotics frameworks provide mechanisms for dynamically loading and unloading parts of robotics applications. While we have a fuzzy picture of the state-of-the-art in robotic reconfiguration from an academic perspective, we lack a picture of the state-of-practice from a practitioner perspective. To fill this gap, we survey the literature on reconfiguration in robotic systems by identifying and analyzing 98 relevant papers, review how four major robotics frameworks support reconfiguration, and finally investigate the realization of reconfiguration in 48 robotics applications. When comparing the state-of-the-art with the state-of-practice, we observed a significant discrepancy between them, in particular, the scientific community focuses on complex structural reconfiguration, while in practice only parameter reconfiguration is widely used. Based on our observations, we discuss possible reasons for this discrepancy and conclude with a takeaway message for academics and practitioners interested in robotics.
Family-Based Fingerprint Analysis: A Position Paper
Sep 27, 2022Thousands of vulnerabilities are reported on a monthly basis to security repositories, such as the National Vulnerability Database. Among these vulnerabilities, software misconfiguration is one of the top 10 security risks for web applications. With this large influx of vulnerability reports, software fingerprinting has become a highly desired capability to discover distinctive and efficient signatures and recognize reportedly vulnerable software implementations. Due to the exponential worst-case complexity of fingerprint matching, designing more efficient methods for fingerprinting becomes highly desirable, especially for variability-intensive systems where optional features add another exponential factor to its analysis. This position paper presents our vision of a framework that lifts model learning and family-based analysis principles to software fingerprinting. In this framework, we propose unifying databases of signatures into a featured finite state machine and using presence conditions to specify whether and in which circumstances a given input-output trace is observed. We believe feature-based signatures can aid performance improvements by reducing the size of fingerprints under analysis.
Robotics Software Engineering: A Perspective from the Service Robotics Domain
Jul 07, 2020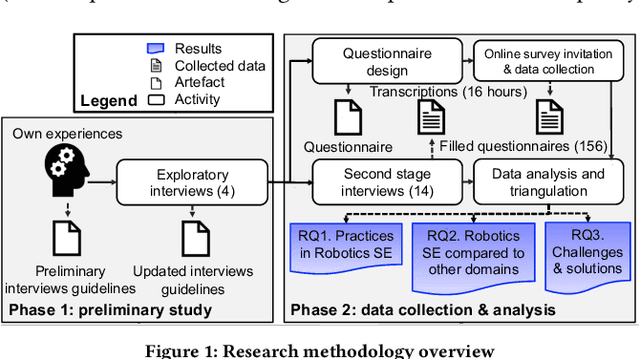
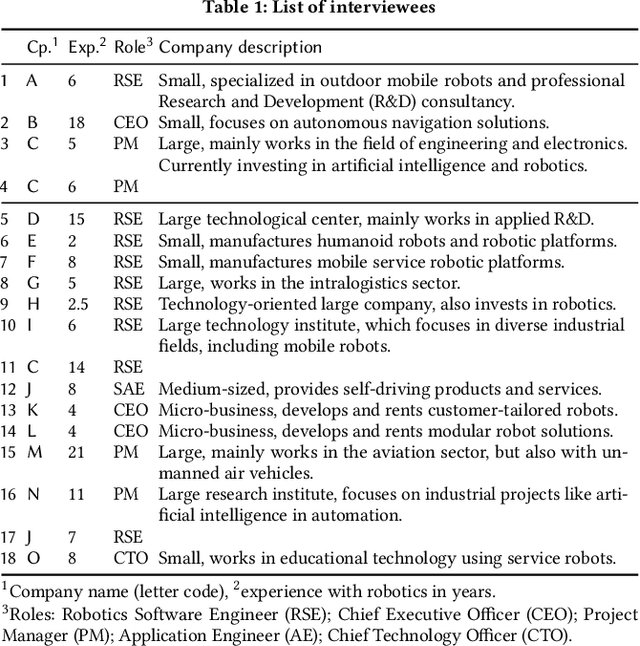
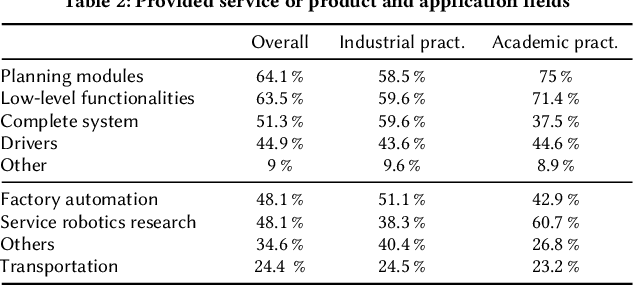
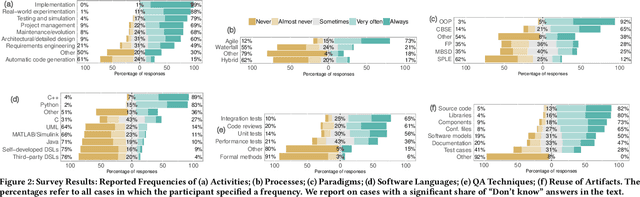
Robots that support humans by performing useful tasks (a.k.a., service robots) are booming worldwide. In contrast to industrial robots, the development of service robots comes with severe software engineering challenges, since they require high levels of robustness and autonomy to operate in highly heterogeneous environments. As a domain with critical safety implications, service robotics faces a need for sound software development practices. In this paper, we present the first large-scale empirical study to assess the state of the art and practice of robotics software engineering. We conducted 18 semi-structured interviews with industrial practitioners working in 15 companies from 9 different countries and a survey with 156 respondents (from 26 countries) from the robotics domain. Our results provide a comprehensive picture of (i) the practices applied by robotics industrial and academic practitioners, including processes, paradigms, languages, tools, frameworks, and reuse practices, (ii) the distinguishing characteristics of robotics software engineering, and (iii) recurrent challenges usually faced, together with adopted solutions. The paper concludes by discussing observations, derived hypotheses, and proposed actions for researchers and practitioners.