 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoftware Reconfiguration in Robotics
Oct 02, 2023Since it has often been claimed by academics that reconfiguration is essential, many approaches to reconfiguration, especially of robotic systems, have been developed. Accordingly, the literature on robotics is rich in techniques for reconfiguring robotic systems. However, when talking to researchers in the domain, there seems to be no common understanding of what exactly reconfiguration is and how it relates to other concepts such as adaptation. Beyond this academic perspective, robotics frameworks provide mechanisms for dynamically loading and unloading parts of robotics applications. While we have a fuzzy picture of the state-of-the-art in robotic reconfiguration from an academic perspective, we lack a picture of the state-of-practice from a practitioner perspective. To fill this gap, we survey the literature on reconfiguration in robotic systems by identifying and analyzing 98 relevant papers, review how four major robotics frameworks support reconfiguration, and finally investigate the realization of reconfiguration in 48 robotics applications. When comparing the state-of-the-art with the state-of-practice, we observed a significant discrepancy between them, in particular, the scientific community focuses on complex structural reconfiguration, while in practice only parameter reconfiguration is widely used. Based on our observations, we discuss possible reasons for this discrepancy and conclude with a takeaway message for academics and practitioners interested in robotics.
Robotics Software Engineering: A Perspective from the Service Robotics Domain
Jul 07, 2020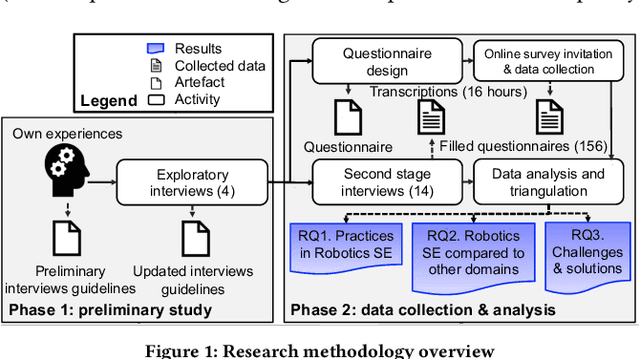
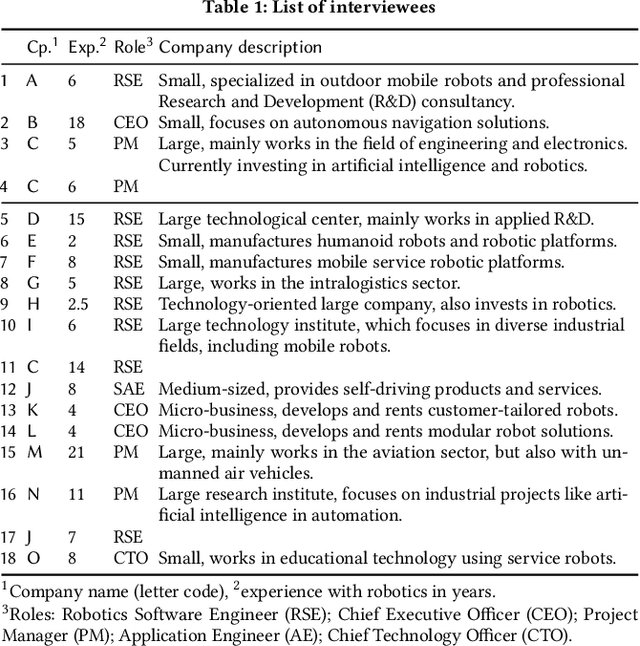
Robots that support humans by performing useful tasks (a.k.a., service robots) are booming worldwide. In contrast to industrial robots, the development of service robots comes with severe software engineering challenges, since they require high levels of robustness and autonomy to operate in highly heterogeneous environments. As a domain with critical safety implications, service robotics faces a need for sound software development practices. In this paper, we present the first large-scale empirical study to assess the state of the art and practice of robotics software engineering. We conducted 18 semi-structured interviews with industrial practitioners working in 15 companies from 9 different countries and a survey with 156 respondents (from 26 countries) from the robotics domain. Our results provide a comprehensive picture of (i) the practices applied by robotics industrial and academic practitioners, including processes, paradigms, languages, tools, frameworks, and reuse practices, (ii) the distinguishing characteristics of robotics software engineering, and (iii) recurrent challenges usually faced, together with adopted solutions. The paper concludes by discussing observations, derived hypotheses, and proposed actions for researchers and practitioners.