 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOVINS: Visual-Inertial SLAM for Centralized Collaboration
Aug 12, 2021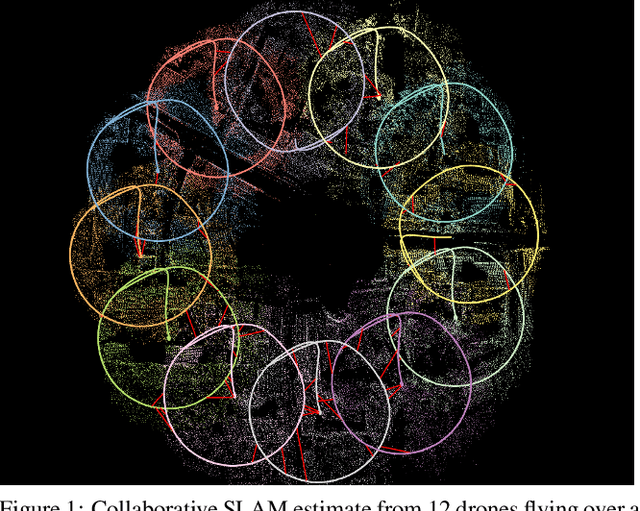
Collaborative SLAM enables a group of agents to simultaneously co-localize and jointly map an environment, thus paving the way to wide-ranging applications of multi-robot perception and multi-user AR experiences by eliminating the need for external infrastructure or pre-built maps. This article presents COVINS, a novel collaborative SLAM system, that enables multi-agent, scalable SLAM in large environments and for large teams of more than 10 agents. The paradigm here is that each agent runs visual-inertial odomety independently onboard in order to ensure its autonomy, while sharing map information with the COVINS server back-end running on a powerful local PC or a remote cloud server. The server back-end establishes an accurate collaborative global estimate from the contributed data, refining the joint estimate by means of place recognition, global optimization and removal of redundant data, in order to ensure an accurate, but also efficient SLAM process. A thorough evaluation of COVINS reveals increased accuracy of the collaborative SLAM estimates, as well as efficiency in both removing redundant information and reducing the coordination overhead, and demonstrates successful operation in a large-scale mission with 12 agents jointly performing SLAM.
Fashion Landmark Detection and Category Classification for Robotics
Mar 26, 2020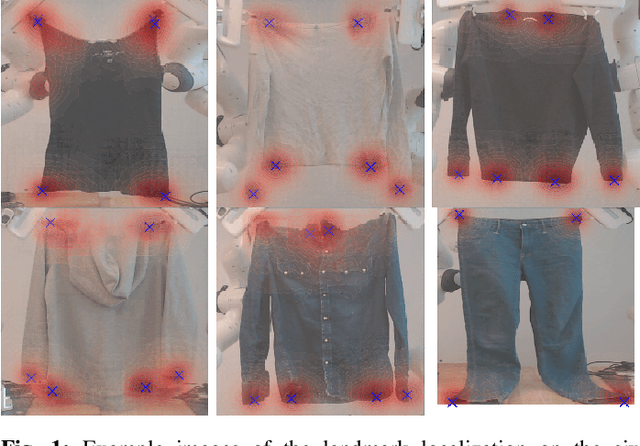

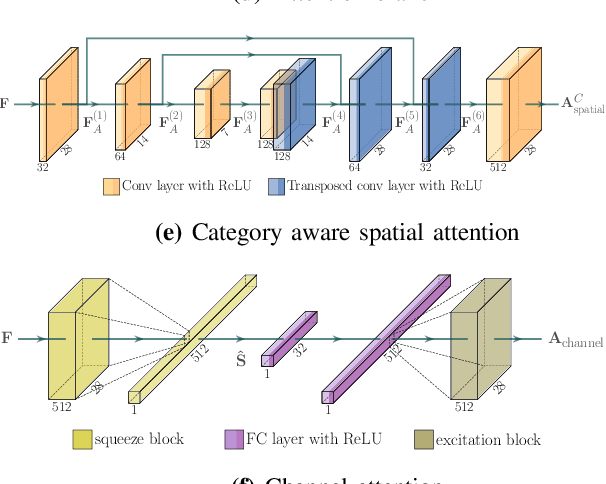
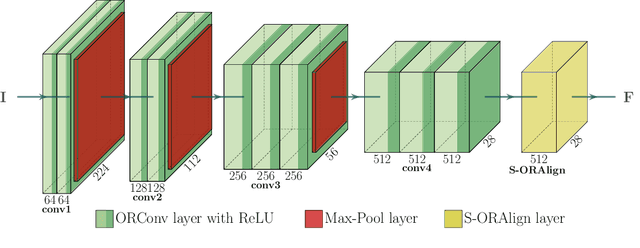
Research on automated, image based identification of clothing categories and fashion landmarks has recently gained significant interest due to its potential impact on areas such as robotic clothing manipulation, automated clothes sorting and recycling, and online shopping. Several public and annotated fashion datasets have been created to facilitate research advances in this direction. In this work, we make the first step towards leveraging the data and techniques developed for fashion image analysis in vision-based robotic clothing manipulation tasks. We focus on techniques that can generalize from large-scale fashion datasets to less structured, small datasets collected in a robotic lab. Specifically, we propose training data augmentation methods such as elastic warping, and model adjustments such as rotation invariant convolutions to make the model generalize better. Our experiments demonstrate that our approach outperforms stateof-the art models with respect to clothing category classification and fashion landmark detection when tested on previously unseen datasets. Furthermore, we present experimental results on a new dataset composed of images where a robot holds different garments, collected in our lab.
Efficient Smoothing of Dilated Convolutions for Image Segmentation
Mar 19, 2019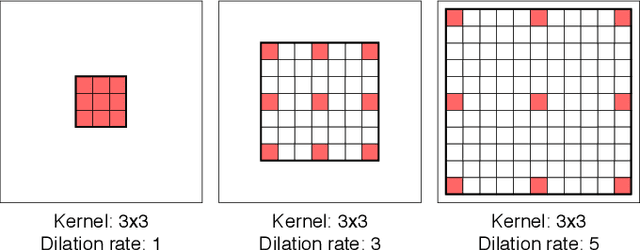
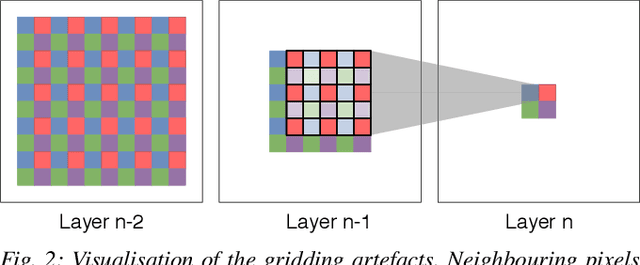
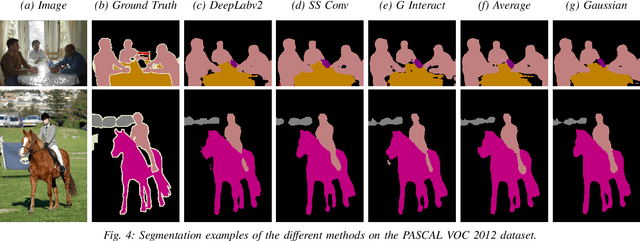
Dilated Convolutions have been shown to be highly useful for the task of image segmentation. By introducing gaps into convolutional filters, they enable the use of larger receptive fields without increasing the original kernel size. Even though this allows for the inexpensive capturing of features at different scales, the structure of the dilated convolutional filter leads to a loss of information. We hypothesise that inexpensive modifications to Dilated Convolutional Neural Networks, such as additional averaging layers, could overcome this limitation. In this project we test this hypothesis by evaluating the effect of these modifications for a state-of-the art image segmentation system and compare them to existing approaches with the same objective. Our experiments show that our proposed methods improve the performance of dilated convolutions for image segmentation. Crucially, our modifications achieve these results at a much lower computational cost than previous smoothing approaches.