 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA lunar reconnaissance drone for cooperative exploration and high-resolution mapping of extreme locations
Jun 19, 2023An efficient characterization of scientifically significant locations is essential prior to the return of humans to the Moon. The highest resolution imagery acquired from orbit of south-polar shadowed regions and other relevant locations remains, at best, an order of magnitude larger than the characteristic length of most of the robotic systems to be deployed. This hinders the planning and successful implementation of prospecting missions and poses a high risk for the traverse of robots and humans, diminishing the potential overall scientific and commercial return of any mission. We herein present the design of a lightweight, compact, autonomous, and reusable lunar reconnaissance drone capable of assisting other ground-based robotic assets, and eventually humans, in the characterization and high-resolution mapping (~0.1 m/px) of particularly challenging and hard-to-access locations on the lunar surface. The proposed concept consists of two main subsystems: the drone and its service station. With a total combined wet mass of 100 kg, the system is capable of 11 flights without refueling the service station, enabling almost 9 km of accumulated flight distance. The deployment of such a system could significantly impact the efficiency of upcoming exploration missions, increasing the distance covered per day of exploration and significantly reducing the need for recurrent contacts with ground stations on Earth.
KIGLIS: Smart Networks for Smart Cities
Jun 09, 2021
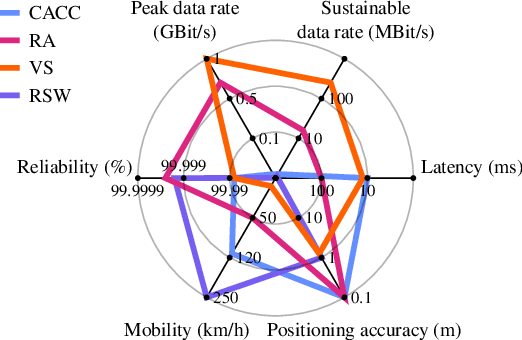
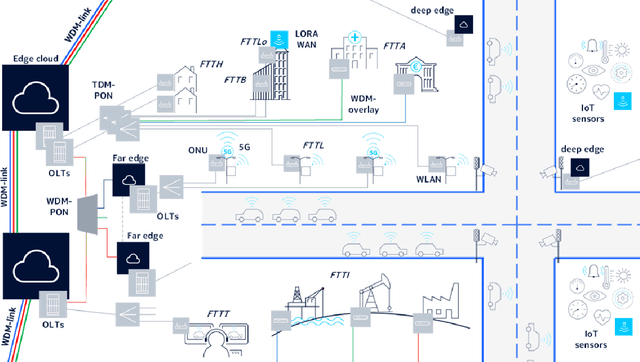
Smart cities will be characterized by a variety of intelligent and networked services, each with specific requirements for the underlying network infrastructure. While smart city architectures and services have been studied extensively, little attention has been paid to the network technology. The KIGLIS research project, consisting of a consortium of companies, universities and research institutions, focuses on artificial intelligence for optimizing fiber-optic networks of a smart city, with a special focus on future mobility applications, such as automated driving. In this paper, we present early results on our process of collecting smart city requirements for communication networks, which will lead towards reference infrastructure and architecture solutions. Finally, we suggest directions in which artificial intelligence will improve smart city networks.
Replication Markets: Results, Lessons, Challenges and Opportunities in AI Replication
May 10, 2020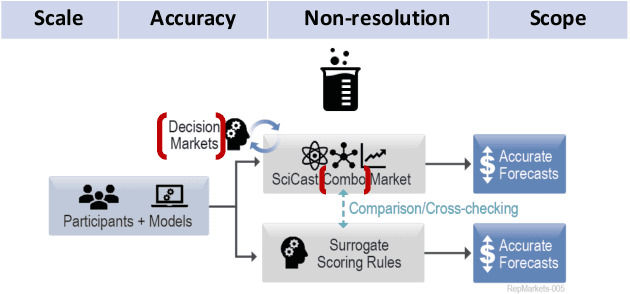
The last decade saw the emergence of systematic large-scale replication projects in the social and behavioral sciences, (Camerer et al., 2016, 2018; Ebersole et al., 2016; Klein et al., 2014, 2018; Collaboration, 2015). These projects were driven by theoretical and conceptual concerns about a high fraction of "false positives" in the scientific publications (Ioannidis, 2005) (and a high prevalence of "questionable research practices" (Simmons, Nelson, and Simonsohn, 2011). Concerns about the credibility of research findings are not unique to the behavioral and social sciences; within Computer Science, Artificial Intelligence (AI) and Machine Learning (ML) are areas of particular concern (Lucic et al., 2018; Freire, Bonnet, and Shasha, 2012; Gundersen and Kjensmo, 2018; Henderson et al., 2018). Given the pioneering role of the behavioral and social sciences in the promotion of novel methodologies to improve the credibility of research, it is a promising approach to analyze the lessons learned from this field and adjust strategies for Computer Science, AI and ML In this paper, we review approaches used in the behavioral and social sciences and in the DARPA SCORE project. We particularly focus on the role of human forecasting of replication outcomes, and how forecasting can leverage the information gained from relatively labor and resource-intensive replications. We will discuss opportunities and challenges of using these approaches to monitor and improve the credibility of research areas in Computer Science, AI, and ML.