 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-Accelerated Event-Graph Neural Networks for Low-Latency Time-Series Classification on SoC FPGA
Mar 09, 2025



As the quantities of data recorded by embedded edge sensors grow, so too does the need for intelligent local processing. Such data often comes in the form of time-series signals, based on which real-time predictions can be made locally using an AI model. However, a hardware-software approach capable of making low-latency predictions with low power consumption is required. In this paper, we present a hardware implementation of an event-graph neural network for time-series classification. We leverage an artificial cochlea model to convert the input time-series signals into a sparse event-data format that allows the event-graph to drastically reduce the number of calculations relative to other AI methods. We implemented the design on a SoC FPGA and applied it to the real-time processing of the Spiking Heidelberg Digits (SHD) dataset to benchmark our approach against competitive solutions. Our method achieves a floating-point accuracy of 92.7% on the SHD dataset for the base model, which is only 2.4% and 2% less than the state-of-the-art models with over 10% and 67% fewer model parameters, respectively. It also outperforms FPGA-based spiking neural network implementations by 19.3% and 4.5%, achieving 92.3% accuracy for the quantised model while using fewer computational resources and reducing latency.
SpikiLi: A Spiking Simulation of LiDAR based Real-time Object Detection for Autonomous Driving
Jun 06, 2022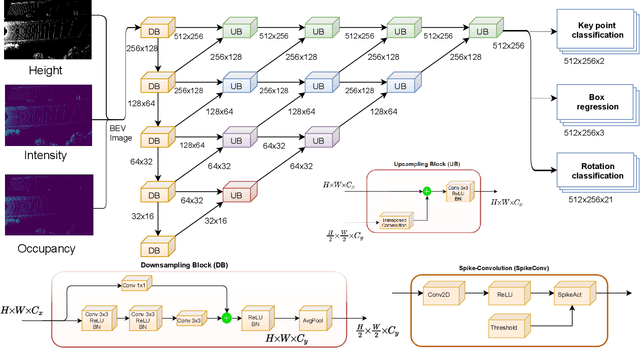
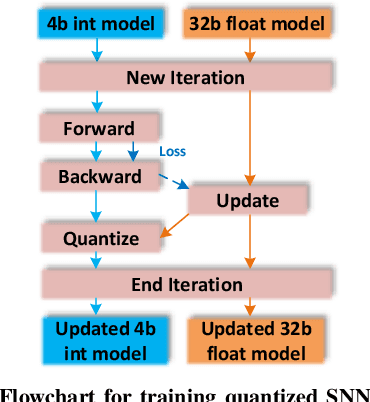
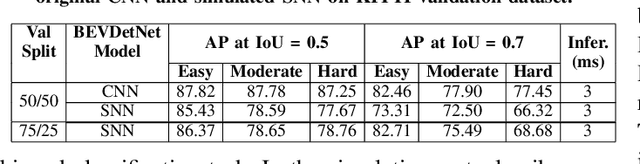
Spiking Neural Networks are a recent and new neural network design approach that promises tremendous improvements in power efficiency, computation efficiency, and processing latency. They do so by using asynchronous spike-based data flow, event-based signal generation, processing, and modifying the neuron model to resemble biological neurons closely. While some initial works have shown significant initial evidence of applicability to common deep learning tasks, their applications in complex real-world tasks has been relatively low. In this work, we first illustrate the applicability of spiking neural networks to a complex deep learning task namely Lidar based 3D object detection for automated driving. Secondly, we make a step-by-step demonstration of simulating spiking behavior using a pre-trained convolutional neural network. We closely model essential aspects of spiking neural networks in simulation and achieve equivalent run-time and accuracy on a GPU. When the model is realized on a neuromorphic hardware, we expect to have significantly improved power efficiency.
Spiking Neural Networks Hardware Implementations and Challenges: a Survey
May 04, 2020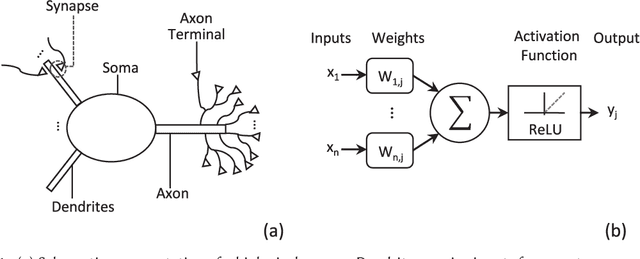
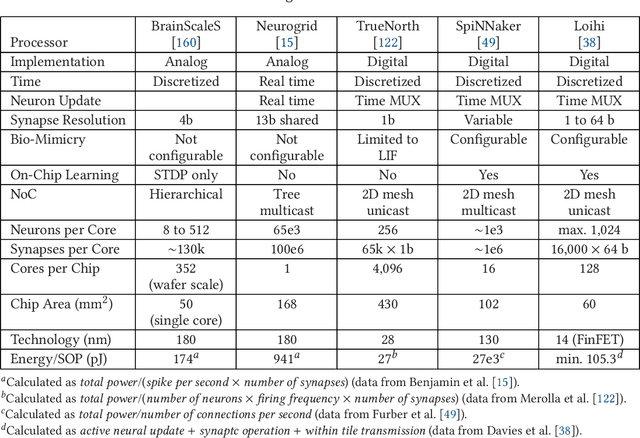
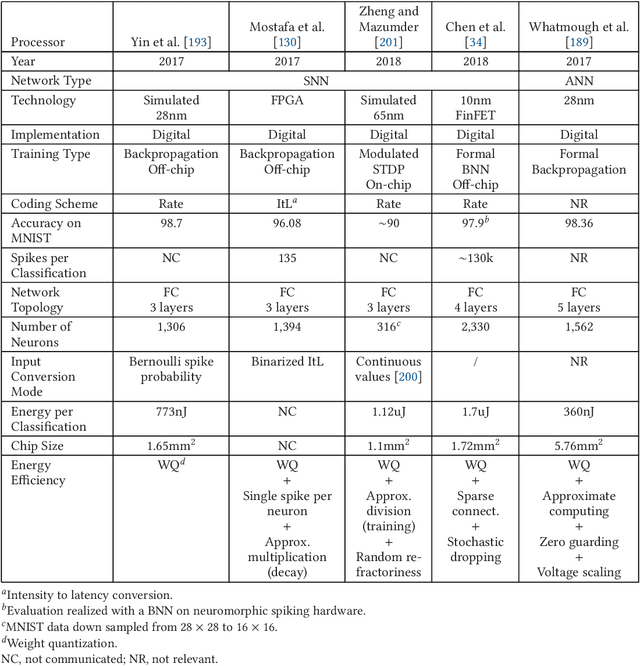
Neuromorphic computing is henceforth a major research field for both academic and industrial actors. As opposed to Von Neumann machines, brain-inspired processors aim at bringing closer the memory and the computational elements to efficiently evaluate machine-learning algorithms. Recently, Spiking Neural Networks, a generation of cognitive algorithms employing computational primitives mimicking neuron and synapse operational principles, have become an important part of deep learning. They are expected to improve the computational performance and efficiency of neural networks, but are best suited for hardware able to support their temporal dynamics. In this survey, we present the state of the art of hardware implementations of spiking neural networks and the current trends in algorithm elaboration from model selection to training mechanisms. The scope of existing solutions is extensive; we thus present the general framework and study on a case-by-case basis the relevant particularities. We describe the strategies employed to leverage the characteristics of these event-driven algorithms at the hardware level and discuss their related advantages and challenges.