 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikiLi: A Spiking Simulation of LiDAR based Real-time Object Detection for Autonomous Driving
Jun 06, 2022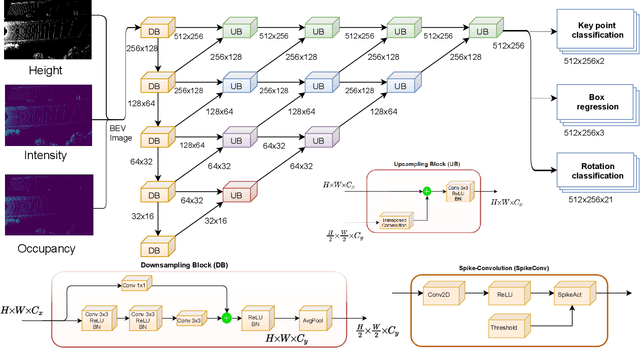
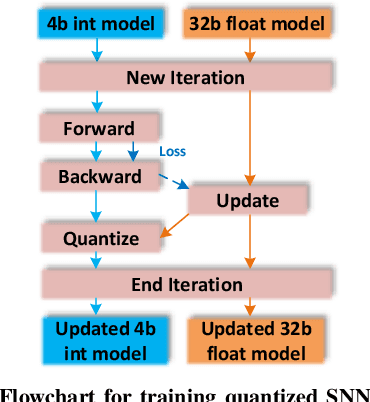
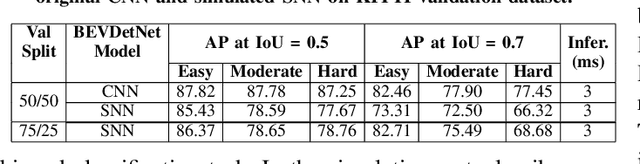
Spiking Neural Networks are a recent and new neural network design approach that promises tremendous improvements in power efficiency, computation efficiency, and processing latency. They do so by using asynchronous spike-based data flow, event-based signal generation, processing, and modifying the neuron model to resemble biological neurons closely. While some initial works have shown significant initial evidence of applicability to common deep learning tasks, their applications in complex real-world tasks has been relatively low. In this work, we first illustrate the applicability of spiking neural networks to a complex deep learning task namely Lidar based 3D object detection for automated driving. Secondly, we make a step-by-step demonstration of simulating spiking behavior using a pre-trained convolutional neural network. We closely model essential aspects of spiking neural networks in simulation and achieve equivalent run-time and accuracy on a GPU. When the model is realized on a neuromorphic hardware, we expect to have significantly improved power efficiency.
LiMoSeg: Real-time Bird's Eye View based LiDAR Motion Segmentation
Nov 08, 2021
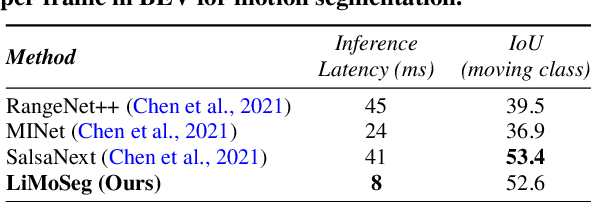
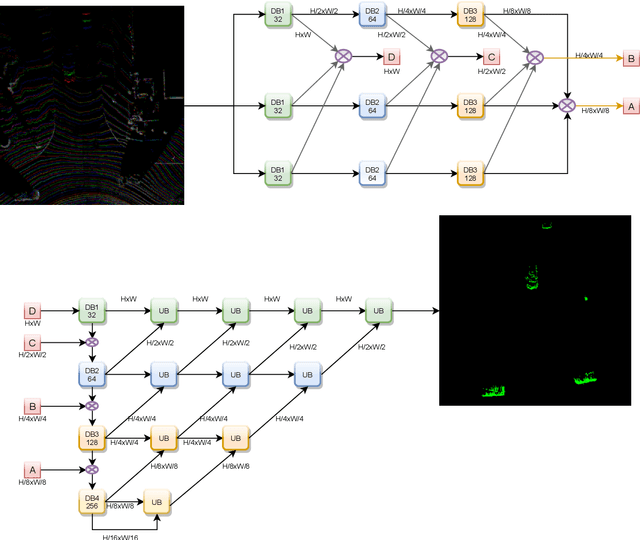
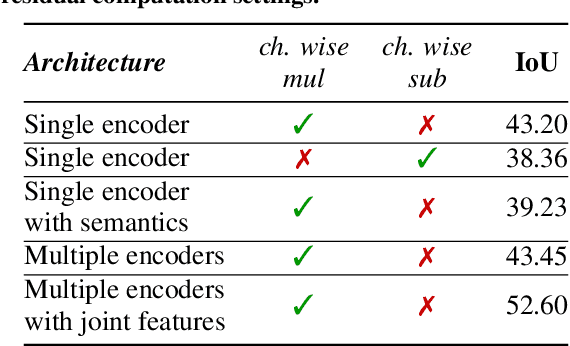
Moving object detection and segmentation is an essential task in the Autonomous Driving pipeline. Detecting and isolating static and moving components of a vehicle's surroundings are particularly crucial in path planning and localization tasks. This paper proposes a novel real-time architecture for motion segmentation of Light Detection and Ranging (LiDAR) data. We use two successive scans of LiDAR data in 2D Bird's Eye View (BEV) representation to perform pixel-wise classification as static or moving. Furthermore, we propose a novel data augmentation technique to reduce the significant class imbalance between static and moving objects. We achieve this by artificially synthesizing moving objects by cutting and pasting static vehicles. We demonstrate a low latency of 8 ms on a commonly used automotive embedded platform, namely Nvidia Jetson Xavier. To the best of our knowledge, this is the first work directly performing motion segmentation in LiDAR BEV space. We provide quantitative results on the challenging SemanticKITTI dataset, and qualitative results are provided in https://youtu.be/2aJ-cL8b0LI.