 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Approach to Elicit Human-Understandable Robot Expressions to Support Human-Robot Interaction
Oct 01, 2024Understanding the intentions of robots is essential for natural and seamless human-robot collaboration. Ensuring that robots have means for non-verbal communication is a basis for intuitive and implicit interaction. For this, we contribute an approach to elicit and design human-understandable robot expressions. We outline the approach in the context of non-humanoid robots. We paired human mimicking and enactment with research from gesture elicitation in two phases: first, to elicit expressions, and second, to ensure they are understandable. We present an example application through two studies (N=16 \& N=260) of our approach to elicit expressions for a simple 6-DoF robotic arm. We show that it enabled us to design robot expressions that signal curiosity and interest in getting attention. Our main contribution is an approach to generate and validate understandable expressions for robots, enabling more natural human-robot interaction.
POLAR3D: Augmenting NASA's POLAR Dataset for Data-Driven Lunar Perception and Rover Simulation
Sep 21, 2023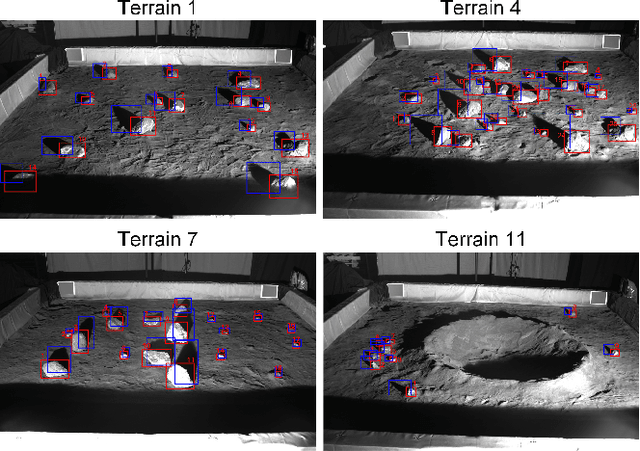
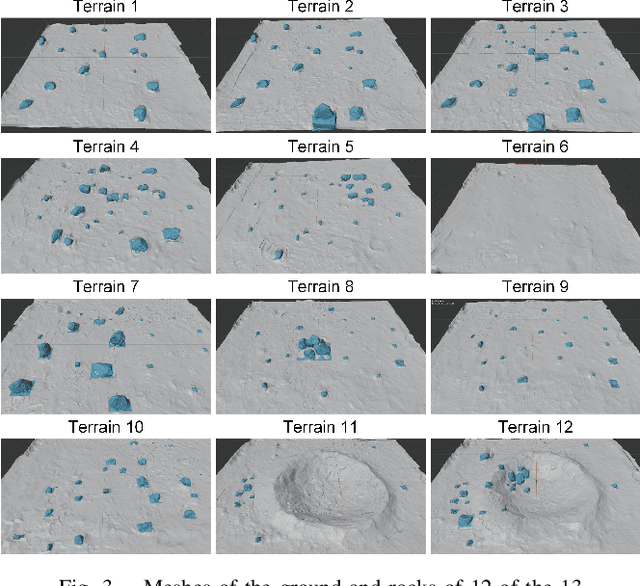
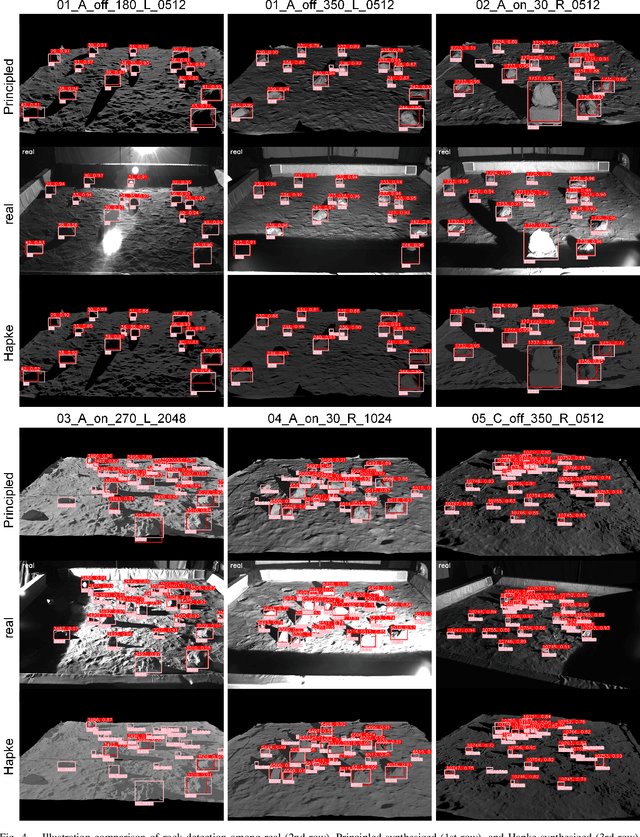
We report on an effort that led to POLAR3D, a set of digital assets that enhance the POLAR dataset of stereo images generated by NASA to mimic lunar lighting conditions. Our contributions are twofold. First, we have annotated each photo in the POLAR dataset, providing approximately 23 000 labels for rocks and their shadows. Second, we digitized several lunar terrain scenarios available in the POLAR dataset. Specifically, by utilizing both the lunar photos and the POLAR's LiDAR point clouds, we constructed detailed obj files for all identifiable assets. POLAR3D is the set of digital assets comprising of rock/shadow labels and obj files associated with the digital twins of lunar terrain scenarios. This new dataset can be used for training perception algorithms for lunar exploration and synthesizing photorealistic images beyond the original POLAR collection. Likewise, the obj assets can be integrated into simulation environments to facilitate realistic rover operations in a digital twin of a POLAR scenario. POLAR3D is publicly available to aid perception algorithm development, camera simulation efforts, and lunar simulation exercises.POLAR3D is publicly available at https://github.com/uwsbel/POLAR-digital.