 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Approach to Elicit Human-Understandable Robot Expressions to Support Human-Robot Interaction
Oct 01, 2024Understanding the intentions of robots is essential for natural and seamless human-robot collaboration. Ensuring that robots have means for non-verbal communication is a basis for intuitive and implicit interaction. For this, we contribute an approach to elicit and design human-understandable robot expressions. We outline the approach in the context of non-humanoid robots. We paired human mimicking and enactment with research from gesture elicitation in two phases: first, to elicit expressions, and second, to ensure they are understandable. We present an example application through two studies (N=16 \& N=260) of our approach to elicit expressions for a simple 6-DoF robotic arm. We show that it enabled us to design robot expressions that signal curiosity and interest in getting attention. Our main contribution is an approach to generate and validate understandable expressions for robots, enabling more natural human-robot interaction.
"AI enhances our performance, I have no doubt this one will do the same": The Placebo effect is robust to negative descriptions of AI
Sep 28, 2023
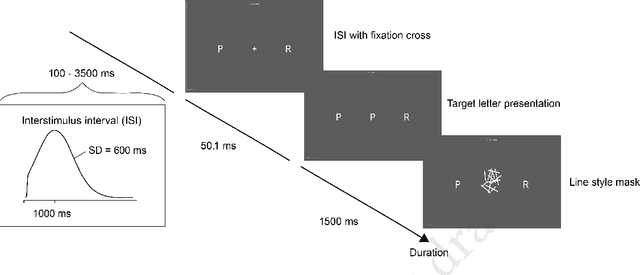


Heightened AI expectations facilitate performance in human-AI interactions through placebo effects. While lowering expectations to control for placebo effects is advisable, overly negative expectations could induce nocebo effects. In a letter discrimination task, we informed participants that an AI would either increase or decrease their performance by adapting the interface, but in reality, no AI was present in any condition. A Bayesian analysis showed that participants had high expectations and performed descriptively better irrespective of the AI description when a sham-AI was present. Using cognitive modeling, we could trace this advantage back to participants gathering more information. A replication study verified that negative AI descriptions do not alter expectations, suggesting that performance expectations with AI are biased and robust to negative verbal descriptions. We discuss the impact of user expectations on AI interactions and evaluation and provide a behavioral placebo marker for human-AI interaction