 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Highly Accurate Dense Depth on a Power Budget using an FPGA-CPU Hybrid SoC
Jul 17, 2019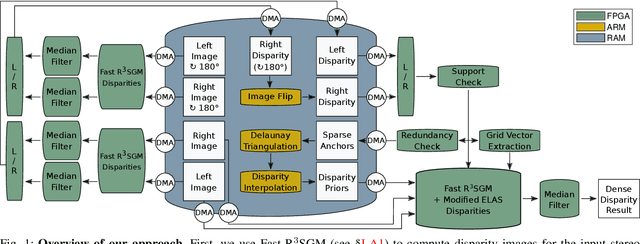

Obtaining highly accurate depth from stereo images in real time has many applications across computer vision and robotics, but in some contexts, upper bounds on power consumption constrain the feasible hardware to embedded platforms such as FPGAs. Whilst various stereo algorithms have been deployed on these platforms, usually cut down to better match the embedded architecture, certain key parts of the more advanced algorithms, e.g. those that rely on unpredictable access to memory or are highly iterative in nature, are difficult to deploy efficiently on FPGAs, and thus the depth quality that can be achieved is limited. In this paper, we leverage a FPGA-CPU chip to propose a novel, sophisticated, stereo approach that combines the best features of SGM and ELAS-based methods to compute highly accurate dense depth in real time. Our approach achieves an 8.7% error rate on the challenging KITTI 2015 dataset at over 50 FPS, with a power consumption of only 5W.
* 6 pages, 7 figures, 2 tables, journal
Learning to Adapt for Stereo
Apr 05, 2019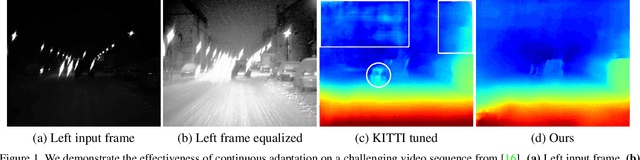
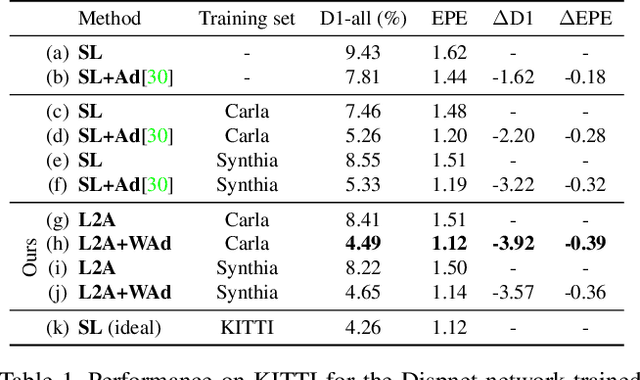
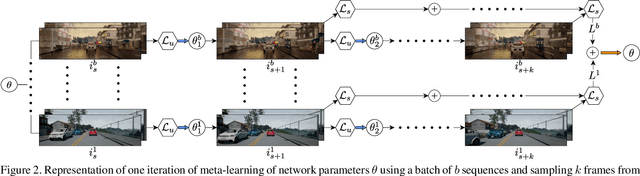
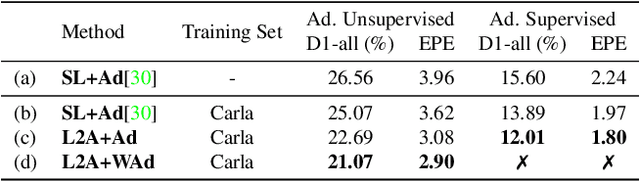
Real world applications of stereo depth estimation require models that are robust to dynamic variations in the environment. Even though deep learning based stereo methods are successful, they often fail to generalize to unseen variations in the environment, making them less suitable for practical applications such as autonomous driving. In this work, we introduce a "learning-to-adapt" framework that enables deep stereo methods to continuously adapt to new target domains in an unsupervised manner. Specifically, our approach incorporates the adaptation procedure into the learning objective to obtain a base set of parameters that are better suited for unsupervised online adaptation. To further improve the quality of the adaptation, we learn a confidence measure that effectively masks the errors introduced during the unsupervised adaptation. We evaluate our method on synthetic and real-world stereo datasets and our experiments evidence that learning-to-adapt is, indeed beneficial for online adaptation on vastly different domains.
Efficient Relaxations for Dense CRFs with Sparse Higher Order Potentials
Oct 26, 2018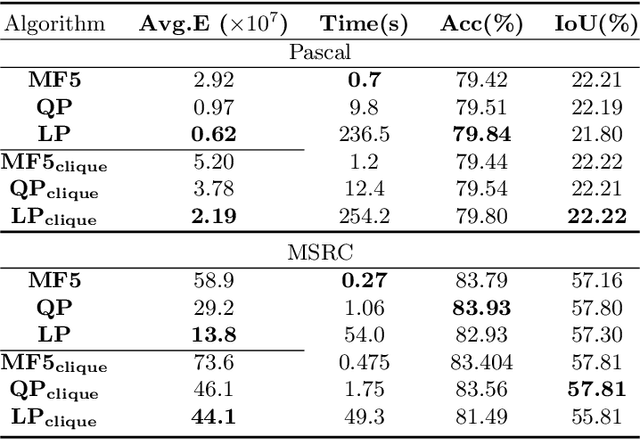
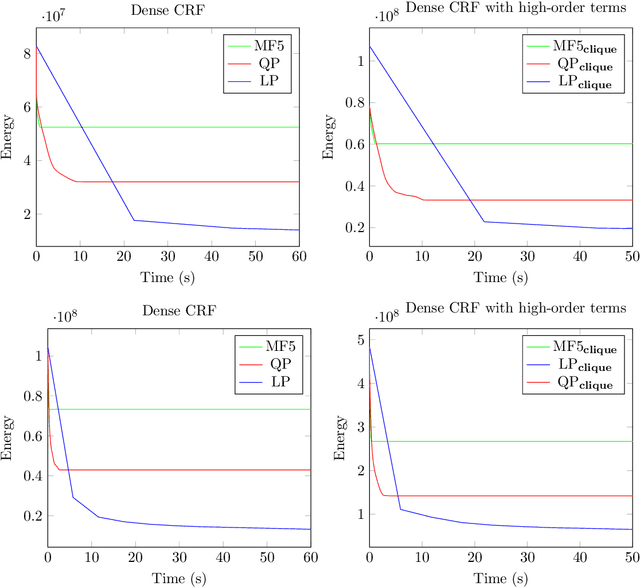
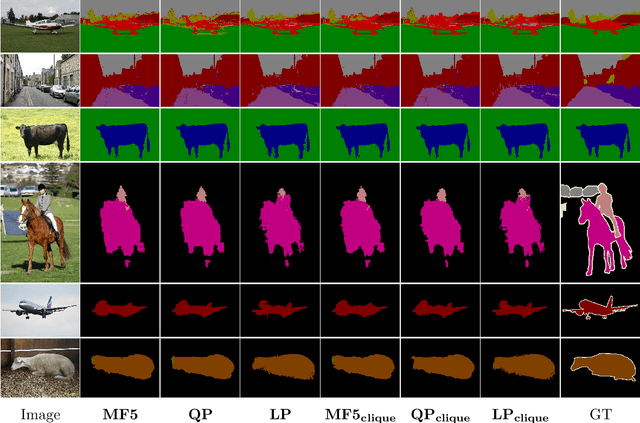
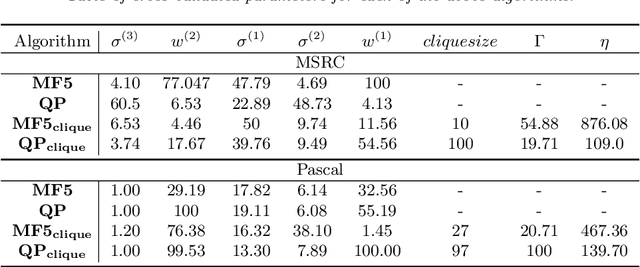
Dense conditional random fields (CRFs) have become a popular framework for modelling several problems in computer vision such as stereo correspondence and multi-class semantic segmentation. By modelling long-range interactions, dense CRFs provide a labelling that captures finer detail than their sparse counterparts. Currently, the state-of-the-art algorithm performs mean-field inference using a filter-based method but fails to provide a strong theoretical guarantee on the quality of the solution. A question naturally arises as to whether it is possible to obtain a maximum a posteriori (MAP) estimate of a dense CRF using a principled method. Within this paper, we show that this is indeed possible. We will show that, by using a filter-based method, continuous relaxations of the MAP problem can be optimised efficiently using state-of-the-art algorithms. Specifically, we will solve a quadratic programming (QP) relaxation using the Frank-Wolfe algorithm and a linear programming (LP) relaxation by developing a proximal minimisation framework. By exploiting labelling consistency in the higher-order potentials and utilising the filter-based method, we are able to formulate the above algorithms such that each iteration has a complexity linear in the number of classes and random variables. The presented algorithms can be applied to any labelling problem using a dense CRF with sparse higher-order potentials. In this paper, we use semantic segmentation as an example application as it demonstrates the ability of the algorithm to scale to dense CRFs with large dimensions. We perform experiments on the Pascal dataset to indicate that the presented algorithms are able to attain lower energies than the mean-field inference method.