 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Highly Accurate Dense Depth on a Power Budget using an FPGA-CPU Hybrid SoC
Jul 17, 2019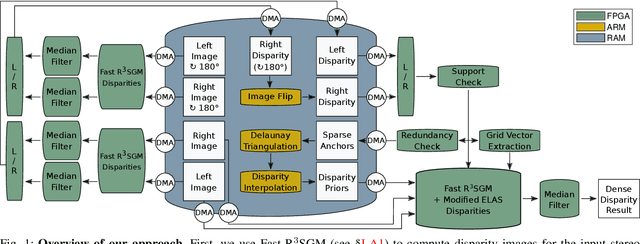

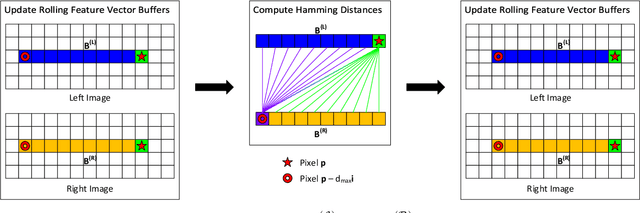
Obtaining highly accurate depth from stereo images in real time has many applications across computer vision and robotics, but in some contexts, upper bounds on power consumption constrain the feasible hardware to embedded platforms such as FPGAs. Whilst various stereo algorithms have been deployed on these platforms, usually cut down to better match the embedded architecture, certain key parts of the more advanced algorithms, e.g. those that rely on unpredictable access to memory or are highly iterative in nature, are difficult to deploy efficiently on FPGAs, and thus the depth quality that can be achieved is limited. In this paper, we leverage a FPGA-CPU chip to propose a novel, sophisticated, stereo approach that combines the best features of SGM and ELAS-based methods to compute highly accurate dense depth in real time. Our approach achieves an 8.7% error rate on the challenging KITTI 2015 dataset at over 50 FPS, with a power consumption of only 5W.
* 6 pages, 7 figures, 2 tables, journal
Learning to Adapt for Stereo
Apr 05, 2019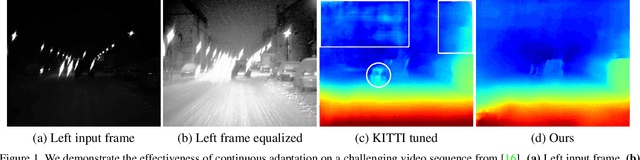
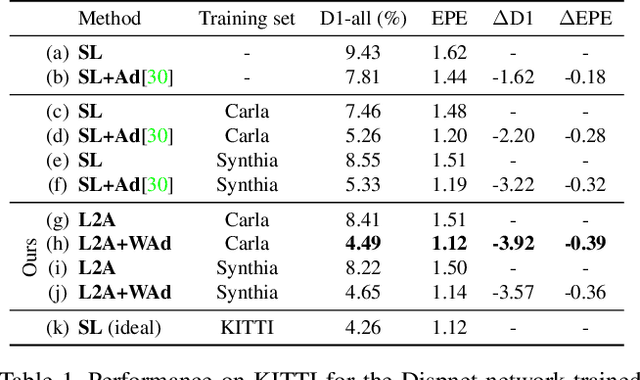
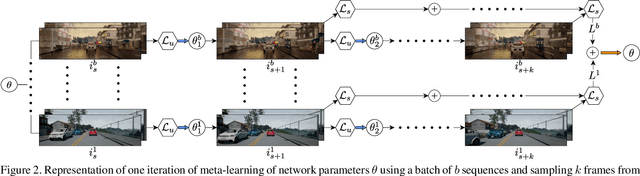
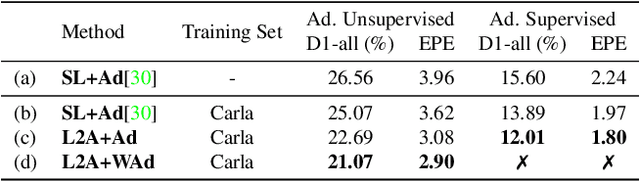
Real world applications of stereo depth estimation require models that are robust to dynamic variations in the environment. Even though deep learning based stereo methods are successful, they often fail to generalize to unseen variations in the environment, making them less suitable for practical applications such as autonomous driving. In this work, we introduce a "learning-to-adapt" framework that enables deep stereo methods to continuously adapt to new target domains in an unsupervised manner. Specifically, our approach incorporates the adaptation procedure into the learning objective to obtain a base set of parameters that are better suited for unsupervised online adaptation. To further improve the quality of the adaptation, we learn a confidence measure that effectively masks the errors introduced during the unsupervised adaptation. We evaluate our method on synthetic and real-world stereo datasets and our experiments evidence that learning-to-adapt is, indeed beneficial for online adaptation on vastly different domains.
R$^3$SGM: Real-time Raster-Respecting Semi-Global Matching for Power-Constrained Systems
Oct 30, 2018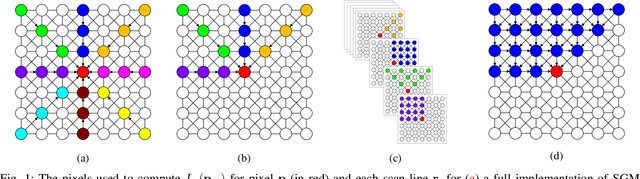
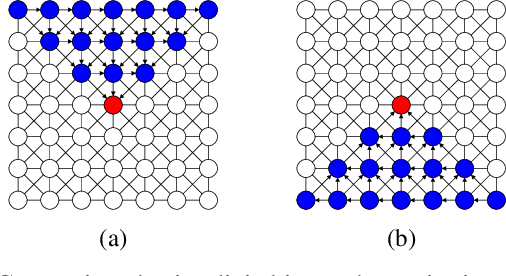
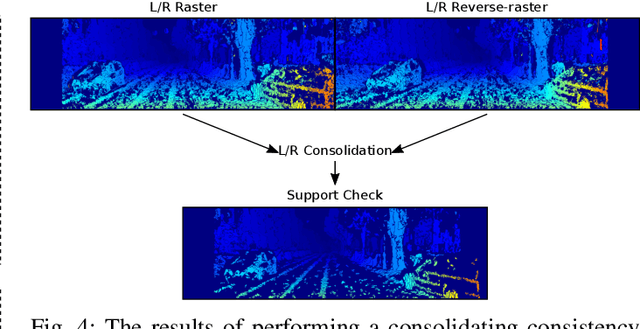
Stereo depth estimation is used for many computer vision applications. Though many popular methods strive solely for depth quality, for real-time mobile applications (e.g. prosthetic glasses or micro-UAVs), speed and power efficiency are equally, if not more, important. Many real-world systems rely on Semi-Global Matching (SGM) to achieve a good accuracy vs. speed balance, but power efficiency is hard to achieve with conventional hardware, making the use of embedded devices such as FPGAs attractive for low-power applications. However, the full SGM algorithm is ill-suited to deployment on FPGAs, and so most FPGA variants of it are partial, at the expense of accuracy. In a non-FPGA context, the accuracy of SGM has been improved by More Global Matching (MGM), which also helps tackle the streaking artifacts that afflict SGM. In this paper, we propose a novel, resource-efficient method that is inspired by MGM's techniques for improving depth quality, but which can be implemented to run in real time on a low-power FPGA. Through evaluation on multiple datasets (KITTI and Middlebury), we show that in comparison to other real-time capable stereo approaches, we can achieve a state-of-the-art balance between accuracy, power efficiency and speed, making our approach highly desirable for use in real-time systems with limited power.
Real-Time Dense Stereo Matching With ELAS on FPGA Accelerated Embedded Devices
Feb 20, 2018

For many applications in low-power real-time robotics, stereo cameras are the sensors of choice for depth perception as they are typically cheaper and more versatile than their active counterparts. Their biggest drawback, however, is that they do not directly sense depth maps; instead, these must be estimated through data-intensive processes. Therefore, appropriate algorithm selection plays an important role in achieving the desired performance characteristics. Motivated by applications in space and mobile robotics, we implement and evaluate a FPGA-accelerated adaptation of the ELAS algorithm. Despite offering one of the best trade-offs between efficiency and accuracy, ELAS has only been shown to run at 1.5-3 fps on a high-end CPU. Our system preserves all intriguing properties of the original algorithm, such as the slanted plane priors, but can achieve a frame rate of 47fps whilst consuming under 4W of power. Unlike previous FPGA based designs, we take advantage of both components on the CPU/FPGA System-on-Chip to showcase the strategy necessary to accelerate more complex and computationally diverse algorithms for such low power, real-time systems.