 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe POLAR Traverse Dataset: A Dataset of Stereo Camera Images Simulating Traverses across Lunar Polar Terrain under Extreme Lighting Conditions
Mar 18, 2024



We present the POLAR Traverse Dataset: a dataset of high-fidelity stereo pair images of lunar-like terrain under polar lighting conditions designed to simulate a straight-line traverse. Images from individual traverses with different camera heights and pitches were recorded at 1 m intervals by moving a suspended stereo bar across a test bed filled with regolith simulant and shaped to mimic lunar south polar terrain. Ground truth geometry and camera position information was also recorded. This dataset is intended for developing and testing software algorithms that rely on stereo or monocular camera images, such as visual odometry, for use in the lunar polar environment, as well as to provide insight into the expected lighting conditions in lunar polar regions.
Registering Articulated Objects With Human-in-the-loop Corrections
Mar 11, 2022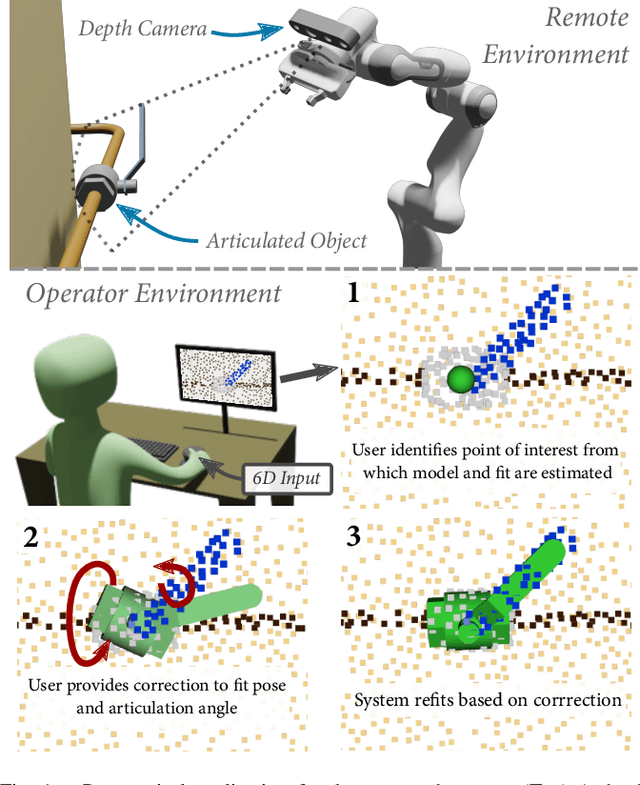
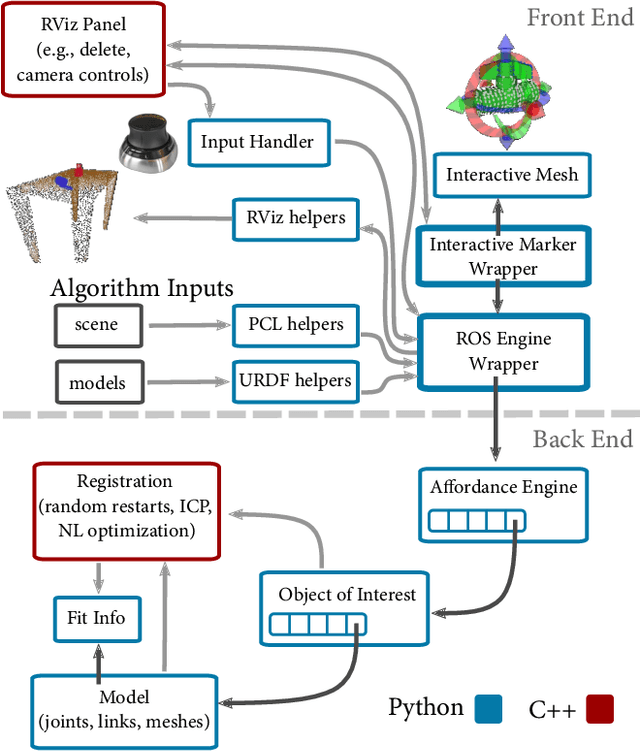
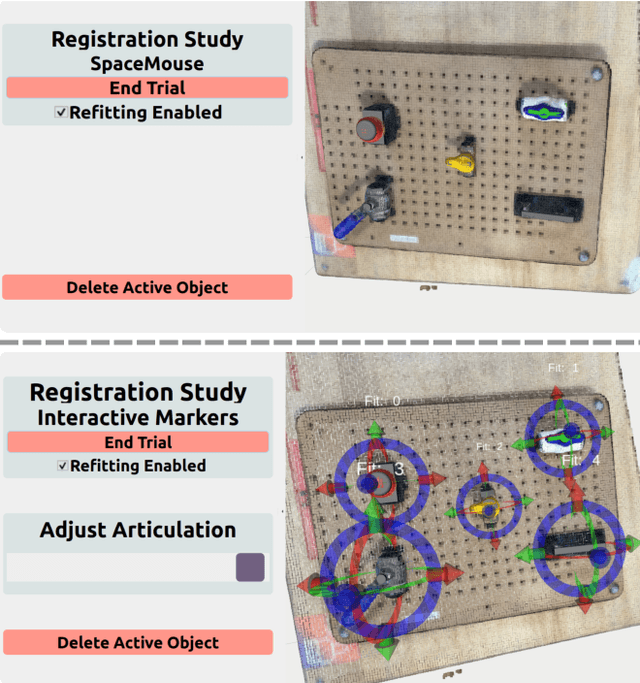
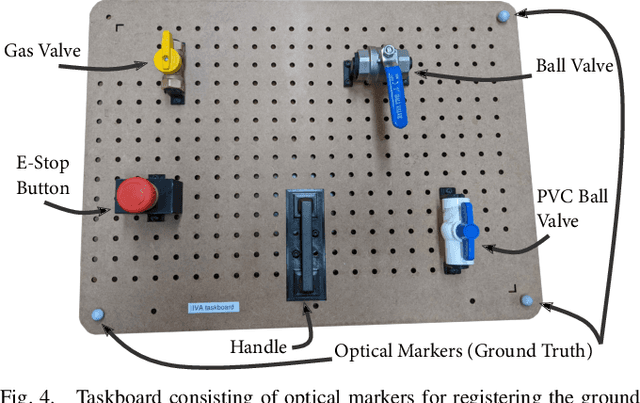
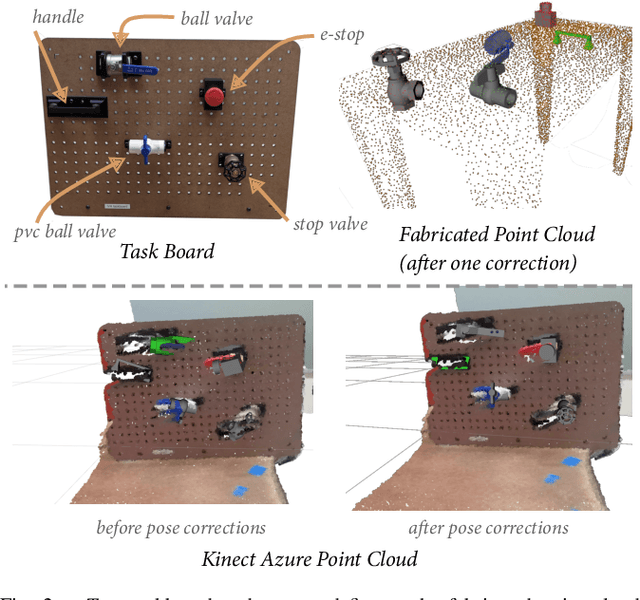
Remotely programming robots to execute tasks often relies on registering objects of interest in the robot's environment. Frequently, these tasks involve articulating objects such as opening or closing a valve. However, existing human-in-the-loop methods for registering objects do not consider articulations and the corresponding impact to the geometry of the object, which can cause the methods to fail. In this work, we present an approach where the registration system attempts to automatically determine the object model, pose, and articulation for user-selected points using a nonlinear iterative closest point algorithm. When the automated fitting is incorrect, the operator can iteratively intervene with corrections after which the system will refit the object. We present an implementation of our fitting procedure and evaluate it with a user study that shows that it can improve user performance, in measures of time on task and task load, ease of use, and usefulness compared to a manual registration approach. We also present a situated example that demonstrates the integration of our method in an end-to-end system for articulating a remote valve.
Affordance Template Registration via Human-in-the-loop Corrections
Sep 28, 2021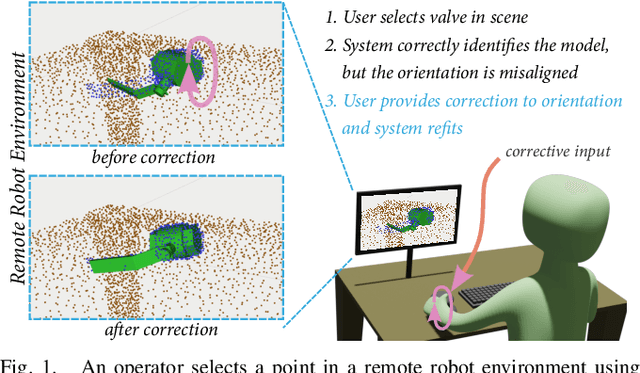
Affordance Templates (ATs) are a method for parameterizing objects for autonomous robot manipulations. In this approach, instances of an object are registered by positioning a model in a 3D environment, which requires a large amount of user input. We instead propose a registration method which combines autonomy and user corrections. For selected objects, the system determines both the model and corresponding pose autonomously. The user makes corrections only if the model or pose is incorrect. This method increases the level of autonomy compared to existing approaches which can reduce user input and time on task. In this paper, we present an overview of existing methods, a description of our method, preliminary results, and planned future work.
Multi-Modal Active Perception for Information Gathering in Science Missions
Dec 28, 2017
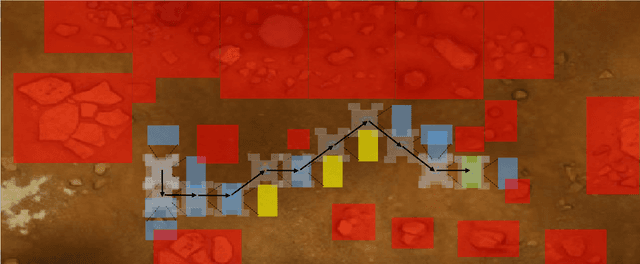
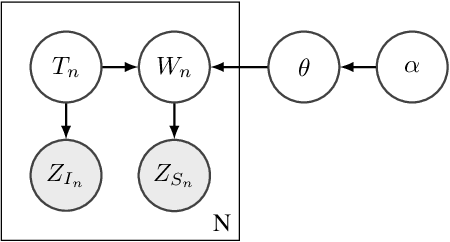
Robotic science missions in remote environments, such as deep ocean and outer space, can involve studying phenomena that cannot directly be observed using on-board sensors but must be deduced by combining measurements of correlated variables with domain knowledge. Traditionally, in such missions, robots passively gather data along prescribed paths, while inference, path planning, and other high level decision making is largely performed by a supervisory science team. However, communication constraints hinder these processes, and hence the rate of scientific progress. This paper presents an active perception approach that aims to reduce robots' reliance on human supervision and improve science productivity by encoding scientists' domain knowledge and decision making process on-board. We use Bayesian networks to compactly model critical aspects of scientific knowledge while remaining robust to observation and modeling uncertainty. We then formulate path planning and sensor scheduling as an information gain maximization problem, and propose a sampling-based solution based on Monte Carlo tree search to plan informative sensing actions which exploit the knowledge encoded in the network. The computational complexity of our framework does not grow with the number of observations taken and allows long horizon planning in an anytime manner, making it highly applicable to field robotics. Simulation results show statistically significant performance improvements over baseline methods, and we validate the practicality of our approach through both hardware experiments and simulated experiments with field data gathered during the NASA Mojave Volatiles Prospector science expedition.