 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistering Articulated Objects With Human-in-the-loop Corrections
Paper and Code
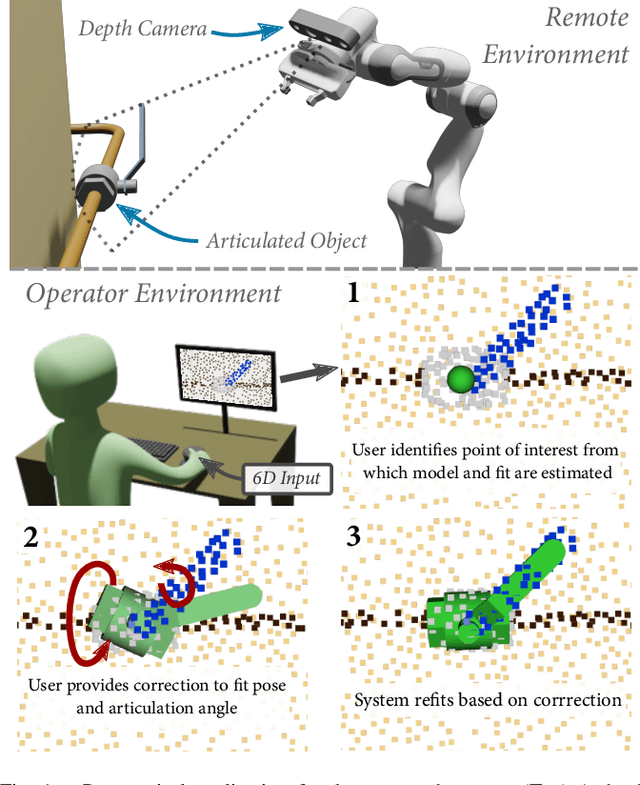
Remotely programming robots to execute tasks often relies on registering objects of interest in the robot's environment. Frequently, these tasks involve articulating objects such as opening or closing a valve. However, existing human-in-the-loop methods for registering objects do not consider articulations and the corresponding impact to the geometry of the object, which can cause the methods to fail. In this work, we present an approach where the registration system attempts to automatically determine the object model, pose, and articulation for user-selected points using a nonlinear iterative closest point algorithm. When the automated fitting is incorrect, the operator can iteratively intervene with corrections after which the system will refit the object. We present an implementation of our fitting procedure and evaluate it with a user study that shows that it can improve user performance, in measures of time on task and task load, ease of use, and usefulness compared to a manual registration approach. We also present a situated example that demonstrates the integration of our method in an end-to-end system for articulating a remote valve.