 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Active Perception for Information Gathering in Science Missions
Dec 28, 2017
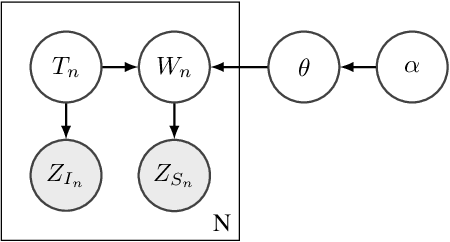
Robotic science missions in remote environments, such as deep ocean and outer space, can involve studying phenomena that cannot directly be observed using on-board sensors but must be deduced by combining measurements of correlated variables with domain knowledge. Traditionally, in such missions, robots passively gather data along prescribed paths, while inference, path planning, and other high level decision making is largely performed by a supervisory science team. However, communication constraints hinder these processes, and hence the rate of scientific progress. This paper presents an active perception approach that aims to reduce robots' reliance on human supervision and improve science productivity by encoding scientists' domain knowledge and decision making process on-board. We use Bayesian networks to compactly model critical aspects of scientific knowledge while remaining robust to observation and modeling uncertainty. We then formulate path planning and sensor scheduling as an information gain maximization problem, and propose a sampling-based solution based on Monte Carlo tree search to plan informative sensing actions which exploit the knowledge encoded in the network. The computational complexity of our framework does not grow with the number of observations taken and allows long horizon planning in an anytime manner, making it highly applicable to field robotics. Simulation results show statistically significant performance improvements over baseline methods, and we validate the practicality of our approach through both hardware experiments and simulated experiments with field data gathered during the NASA Mojave Volatiles Prospector science expedition.
An Approach to Autonomous Science by Modeling Geological Knowledge in a Bayesian Framework
Aug 09, 2017



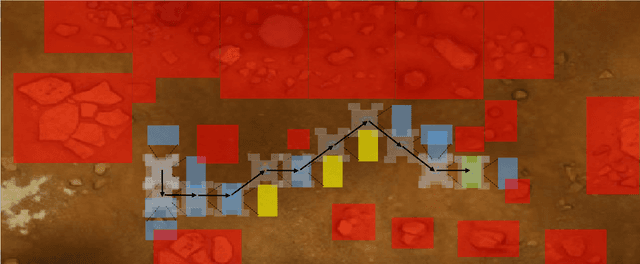
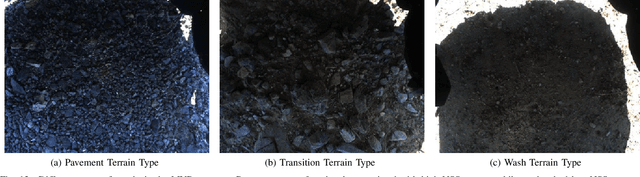
Autonomous Science is a field of study which aims to extend the autonomy of exploration robots from low level functionality, such as on-board perception and obstacle avoidance, to science autonomy, which allows scientists to specify missions at task level. This will enable more remote and extreme environments such as deep ocean and other planets to be studied, leading to significant science discoveries. This paper presents an approach to extend the high level autonomy of robots by enabling them to model and reason about scientific knowledge on-board. We achieve this by using Bayesian networks to encode scientific knowledge and adapting Monte Carlo Tree Search techniques to reason about the network and plan informative sensing actions. The resulting knowledge representation and reasoning framework is anytime, handles large state spaces and robust to uncertainty making it highly applicable to field robotics. We apply the approach to a Mars exploration mission in which the robot is required to plan paths and decide when to use its sensing modalities to study a scientific latent variable of interest. Extensive simulation results show that our approach has significant performance benefits over alternative methods. We also demonstrate the practicality of our approach in an analog Martian environment where our experimental rover, Continuum, plans and executes a science mission autonomously.