 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeculative Sampling via Exponential Races
Apr 21, 2025Speculative decoding accelerates large language model inference using a smaller draft model. In this paper, we establish a surprising connection between speculative decoding and channel simulation, which aims at simulating a noisy channel using as few bits as possible. This connection allows us to provide an information-theoretic analysis of the speed up that can be achieved by speculative decoding. Leveraging this link, we derive an explicit relation between generation speed-up and the number of tokens $k$ generated by the draft model for large $k$, which serves as an upper bound for all $k$. We also propose a novel speculative decoding method via exponential race ERSD that matches state-of-the-art performance.
Timely and Massive Communication in 6G: Pragmatics, Learning, and Inference
Jun 30, 2023



5G has expanded the traditional focus of wireless systems to embrace two new connectivity types: ultra-reliable low latency and massive communication. The technology context at the dawn of 6G is different from the past one for 5G, primarily due to the growing intelligence at the communicating nodes. This has driven the set of relevant communication problems beyond reliable transmission towards semantic and pragmatic communication. This paper puts the evolution of low-latency and massive communication towards 6G in the perspective of these new developments. At first, semantic/pragmatic communication problems are presented by drawing parallels to linguistics. We elaborate upon the relation of semantic communication to the information-theoretic problems of source/channel coding, while generalized real-time communication is put in the context of cyber-physical systems and real-time inference. The evolution of massive access towards massive closed-loop communication is elaborated upon, enabling interactive communication, learning, and cooperation among wireless sensors and actuators.
Semantic Communication of Learnable Concepts
May 14, 2023
We consider the problem of communicating a sequence of concepts, i.e., unknown and potentially stochastic maps, which can be observed only through examples, i.e., the mapping rules are unknown. The transmitter applies a learning algorithm to the available examples, and extracts knowledge from the data by optimizing a probability distribution over a set of models, i.e., known functions, which can better describe the observed data, and so potentially the underlying concepts. The transmitter then needs to communicate the learned models to a remote receiver through a rate-limited channel, to allow the receiver to decode the models that can describe the underlying sampled concepts as accurately as possible in their semantic space. After motivating our analysis, we propose the formal problem of communicating concepts, and provide its rate-distortion characterization, pointing out its connection with the concepts of empirical and strong coordination in a network. We also provide a bound for the distortion-rate function.
Federated mmWave Beam Selection Utilizing LIDAR Data
Feb 04, 2021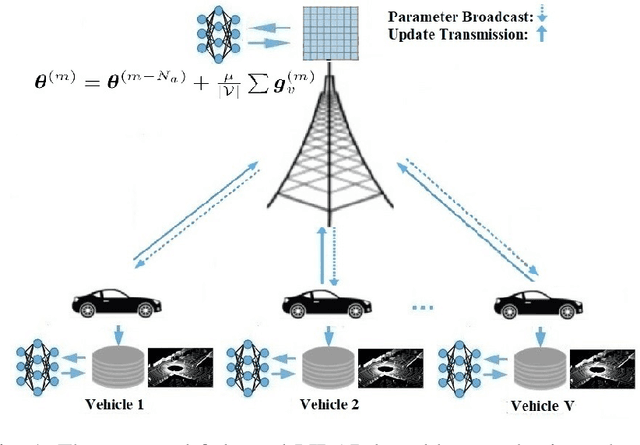
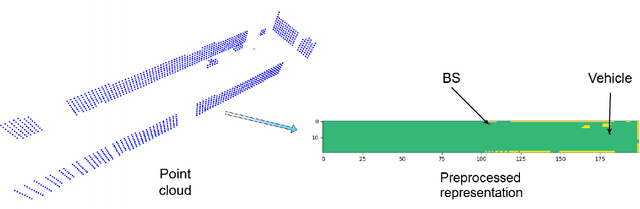
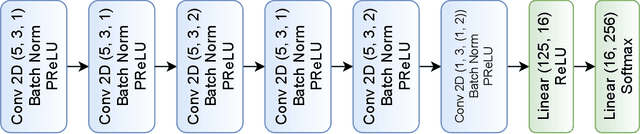
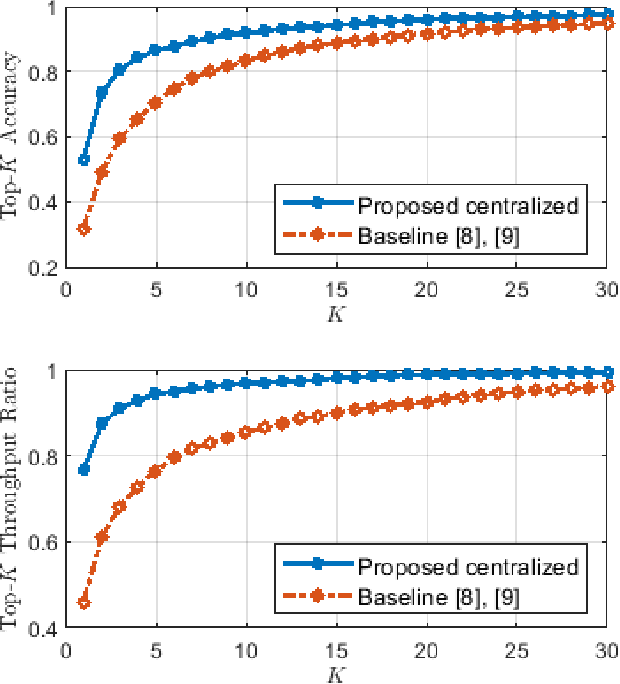
Efficient link configuration in millimeter wave (mmWave) communication systems is a crucial yet challenging task due to the overhead imposed by beam selection on the network performance. For vehicle-to-infrastructure (V2I) networks, side information from LIDAR sensors mounted on the vehicles has been leveraged to reduce the beam search overhead. In this letter, we propose distributed LIDAR aided beam selection for V2I mmWave communication systems utilizing federated training. In the proposed scheme, connected vehicles collaborate to train a shared neural network (NN) on their locally available LIDAR data during normal operation of the system. We also propose an alternative reduced-complexity convolutional NN (CNN) architecture and LIDAR preprocessing, which significantly outperforms previous works in terms of both the performance and the complexity.
A Joint Learning and Communication Framework for Multi-Agent Reinforcement Learning over Noisy Channels
Jan 02, 2021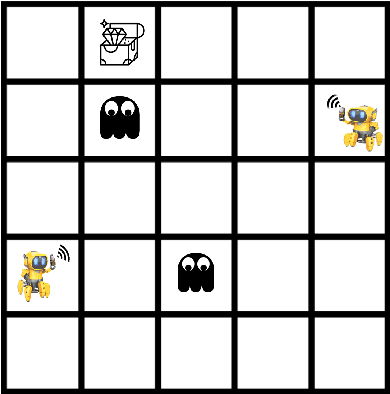
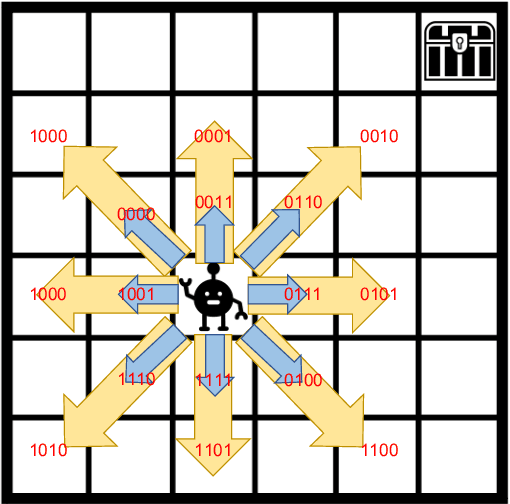
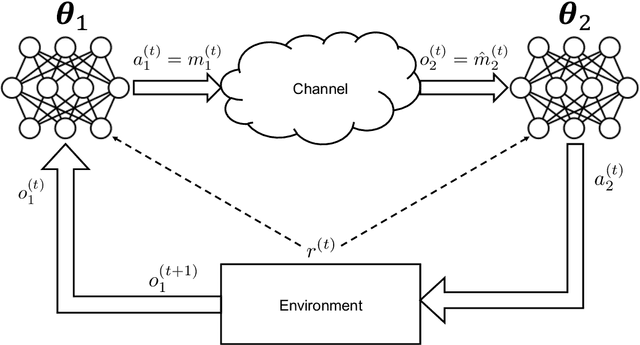
We propose a novel formulation of the "effectiveness problem" in communications, put forth by Shannon and Weaver in their seminal work [2], by considering multiple agents communicating over a noisy channel in order to achieve better coordination and cooperation in a multi-agent reinforcement learning (MARL) framework. Specifically, we consider a multi-agent partially observable Markov decision process (MA-POMDP), in which the agents, in addition to interacting with the environment can also communicate with each other over a noisy communication channel. The noisy communication channel is considered explicitly as part of the dynamics of the environment and the message each agent sends is part of the action that the agent can take. As a result, the agents learn not only to collaborate with each other but also to communicate "effectively" over a noisy channel. This framework generalizes both the traditional communication problem, where the main goal is to convey a message reliably over a noisy channel, and the "learning to communicate" framework that has received recent attention in the MARL literature, where the underlying communication channels are assumed to be error-free. We show via examples that the joint policy learned using the proposed framework is superior to that where the communication is considered separately from the underlying MA-POMDP. This is a very powerful framework, which has many real world applications, from autonomous vehicle planning to drone swarm control, and opens up the rich toolbox of deep reinforcement learning for the design of multi-user communication systems.