 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Wildfire Assets with Commodity RFID and Gaussian Process Modeling
Dec 17, 2025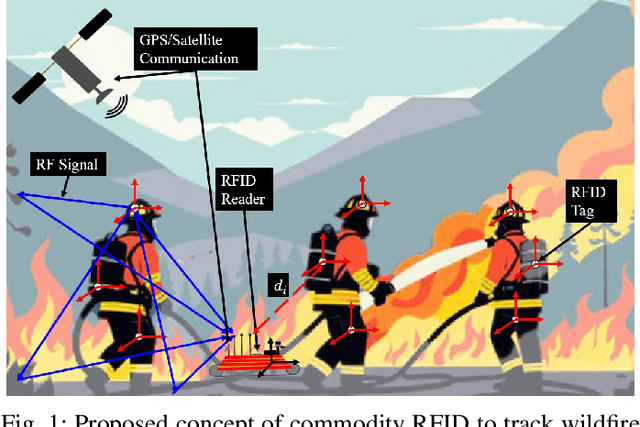
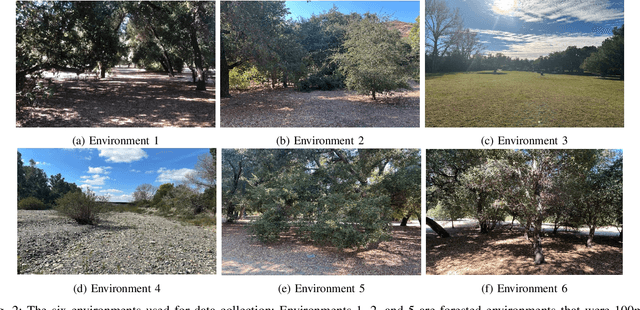
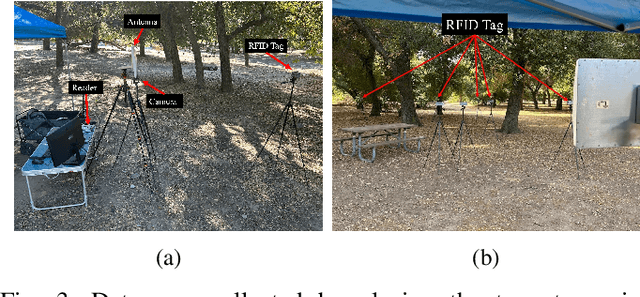
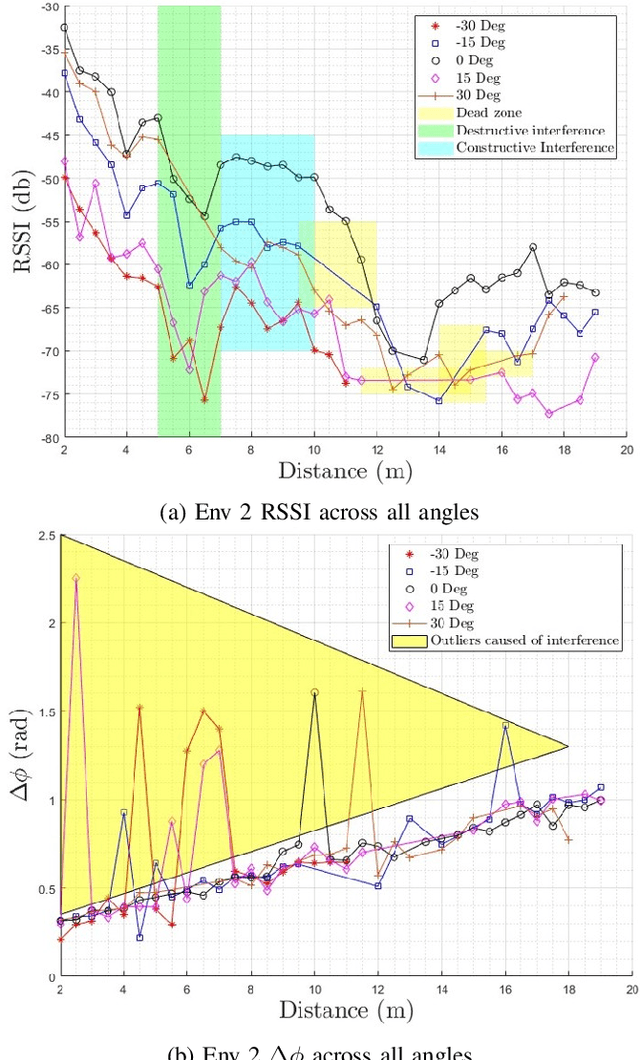
This paper presents a novel, cost-effective, and scalable approach to track numerous assets distributed in forested environments using commodity Radio Frequency Identification (RFID) targeting wildfire response applications. Commodity RFID systems suffer from poor tag localization when dispersed in forested environments due to signal attenuation, multi-path effects and environmental variability. Current methods to address this issue via fingerprinting rely on dispersing tags at known locations {\em a priori}. In this paper, we address the case when it is not possible to tag known locations and show that it is possible to localize tags to accuracies comparable to global positioning systems (GPS) without such a constraint. For this, we propose Gaussian Process to model various environments solely based on RF signal response signatures and without the aid of additional sensors such as global positioning GPS or cameras, and match an unknown RF to the closest match in a model dictionary. We utilize a new weighted log-likelihood method to associate an unknown environment with the closest environment in a dictionary of previously modeled environments, which is a crucial step in being able to use our approach. Our results show that it is possible to achieve localization accuracies of the order of GPS, but with passive commodity RFID, which will allow the tracking of dozens of wildfire assets within the vicinity of mobile readers at-a-time simultaneously, does not require known positions to be tagged {\em a priori}, and can achieve localization at a fraction of the cost compared to GPS.
HiddenObject: Modality-Agnostic Fusion for Multimodal Hidden Object Detection
Aug 28, 2025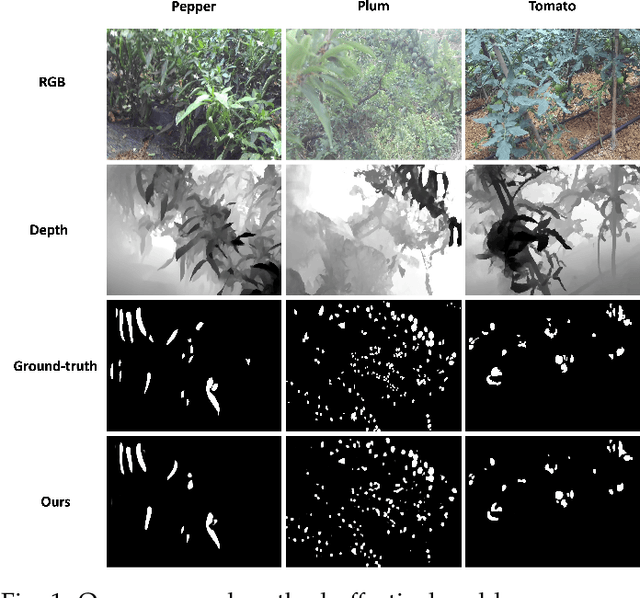
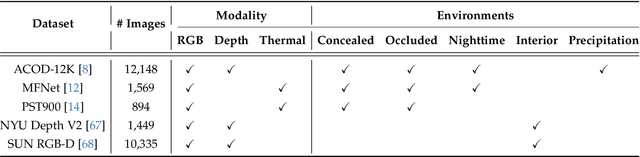
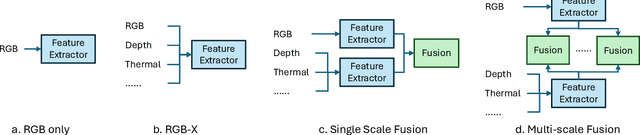
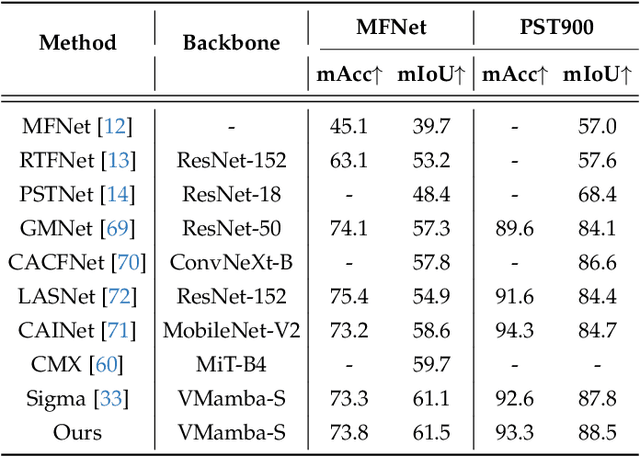
Detecting hidden or partially concealed objects remains a fundamental challenge in multimodal environments, where factors like occlusion, camouflage, and lighting variations significantly hinder performance. Traditional RGB-based detection methods often fail under such adverse conditions, motivating the need for more robust, modality-agnostic approaches. In this work, we present HiddenObject, a fusion framework that integrates RGB, thermal, and depth data using a Mamba-based fusion mechanism. Our method captures complementary signals across modalities, enabling enhanced detection of obscured or camouflaged targets. Specifically, the proposed approach identifies modality-specific features and fuses them in a unified representation that generalizes well across challenging scenarios. We validate HiddenObject across multiple benchmark datasets, demonstrating state-of-the-art or competitive performance compared to existing methods. These results highlight the efficacy of our fusion design and expose key limitations in current unimodal and na\"ive fusion strategies. More broadly, our findings suggest that Mamba-based fusion architectures can significantly advance the field of multimodal object detection, especially under visually degraded or complex conditions.
Distributed Certifiably Correct Range-Aided SLAM
Mar 05, 2025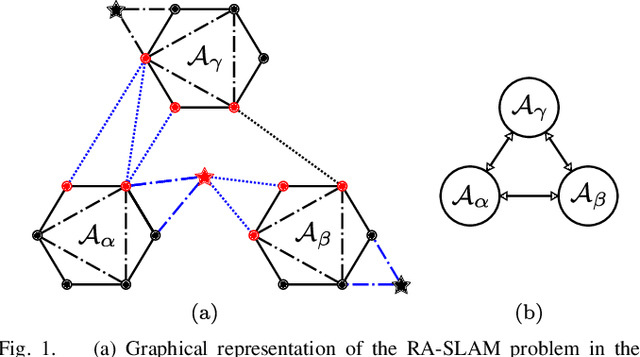
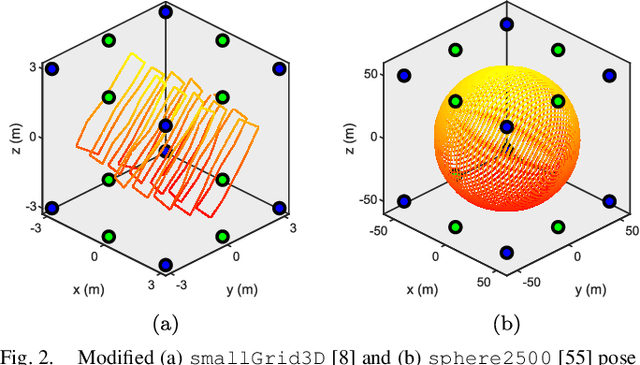
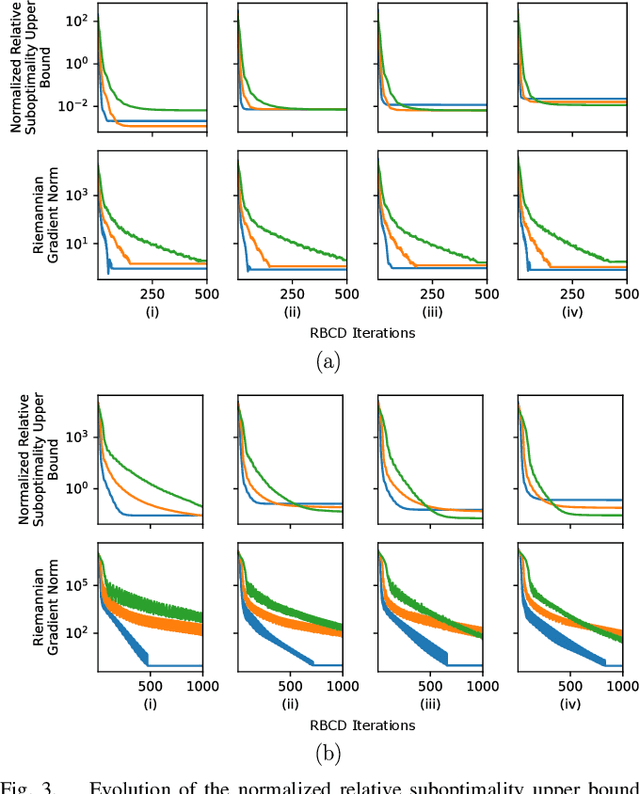
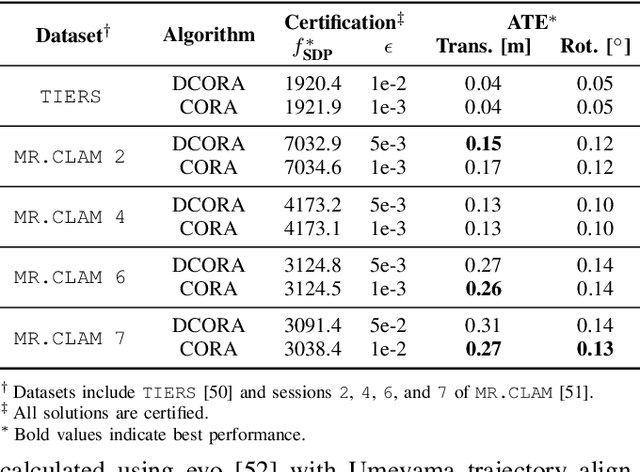
Reliable simultaneous localization and mapping (SLAM) algorithms are necessary for safety-critical autonomous navigation. In the communication-constrained multi-agent setting, navigation systems increasingly use point-to-point range sensors as they afford measurements with low bandwidth requirements and known data association. The state estimation problem for these systems takes the form of range-aided (RA) SLAM. However, distributed algorithms for solving the RA-SLAM problem lack formal guarantees on the quality of the returned estimate. To this end, we present the first distributed algorithm for RA-SLAM that can efficiently recover certifiably globally optimal solutions. Our algorithm, distributed certifiably correct RA-SLAM (DCORA), achieves this via the Riemannian Staircase method, where computational procedures developed for distributed certifiably correct pose graph optimization are generalized to the RA-SLAM problem. We demonstrate DCORA's efficacy on real-world multi-agent datasets by achieving absolute trajectory errors comparable to those of a state-of-the-art centralized certifiably correct RA-SLAM algorithm. Additionally, we perform a parametric study on the structure of the RA-SLAM problem using synthetic data, revealing how common parameters affect DCORA's performance.
Visual-Lidar Map Alignment for Infrastructure Inspections
Jan 27, 2025



Routine and repetitive infrastructure inspections present safety, efficiency, and consistency challenges as they are performed manually, often in challenging or hazardous environments. They can also introduce subjectivity and errors into the process, resulting in undesirable outcomes. Simultaneous localization and mapping (SLAM) presents an opportunity to generate high-quality 3D maps that can be used to extract accurate and objective inspection data. Yet, many SLAM algorithms are limited in their ability to align 3D maps from repeated inspections in GPS-denied settings automatically. This limitation hinders practical long-term asset health assessments by requiring tedious manual alignment for data association across scans from previous inspections. This paper introduces a versatile map alignment algorithm leveraging both visual and lidar data for improved place recognition robustness and presents an infrastructure-focused dataset tailored for consecutive inspections. By detaching map alignment from SLAM, our approach enhances infrastructure inspection pipelines, supports monitoring asset degradation over time, and invigorates SLAM research by permitting exploration beyond existing multi-session SLAM algorithms.
Gaze-based Human-Robot Interaction System for Infrastructure Inspections
Mar 12, 2024Routine inspections for critical infrastructures such as bridges are required in most jurisdictions worldwide. Such routine inspections are largely visual in nature, which are qualitative, subjective, and not repeatable. Although robotic infrastructure inspections address such limitations, they cannot replace the superior ability of experts to make decisions in complex situations, thus making human-robot interaction systems a promising technology. This study presents a novel gaze-based human-robot interaction system, designed to augment the visual inspection performance through mixed reality. Through holograms from a mixed reality device, gaze can be utilized effectively to estimate the properties of the defect in real-time. Additionally, inspectors can monitor the inspection progress online, which enhances the speed of the entire inspection process. Limited controlled experiments demonstrate its effectiveness across various users and defect types. To our knowledge, this is the first demonstration of the real-time application of eye gaze in civil infrastructure inspections.
Edge Ranking of Graphs in Transportation Networks using a Graph Neural Network (GNN)
Mar 25, 2023
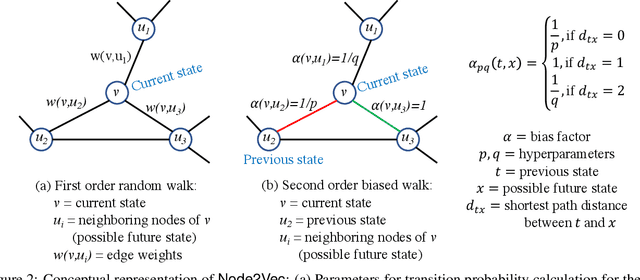

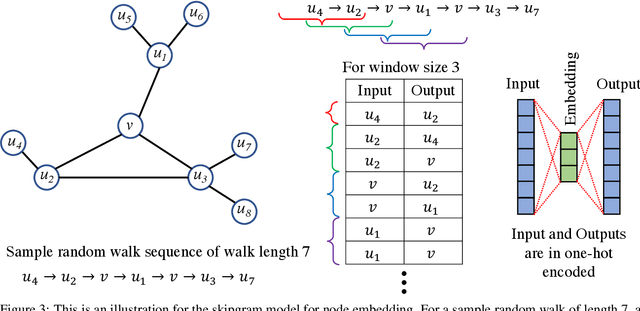
Many networks, such as transportation, power, and water distribution, can be represented as graphs. Crucial challenge in graph representations is identifying the importance of graph edges and their influence on overall network efficiency and information flow performance. For example, important edges in a transportation network are those roads that, when affected, will significantly alter the network's overall efficiency. Commonly used approach to finding such important edges is ``edge betweenness centrality'' (EBC), an edge ranking measure to determine the influential edges of the graph based on connectivity and information spread. Computing the EBC utilizing the common Brandes algorithm involves calculating the shortest paths for every node pair, which can be computationally expensive and restrictive, especially for large graphs. Changes in the graph parameters, e.g., in the edge weight or the addition and deletion of nodes or edges, require the recalculation of the EBC. As the main contribution, we propose an approximate method to estimate the EBC using a Graph Neural Network (GNN), a deep learning-based approach. We show that it is computationally efficient compared to the conventional method, especially for large graphs. The proposed method of GNN-based edge ranking is evaluated on several synthetic graphs and a real-world transportation data set. We show that this framework can estimate the approximate edge ranking much faster compared to the conventional method. This approach is inductive, i.e., training and testing are performed on different sets of graphs with varying numbers of nodes and edges. The proposed method is especially suitable for applications on large-scale networks when edge information is desired, for example, in urban infrastructure improvement projects, power, and water network resilience analyses, and optimizing resource allocations in engineering networks.
A Target-Based Extrinsic Calibration Framework for Non-Overlapping Camera-Lidar Systems Using a Motion Capture System
Mar 19, 2023



In this work, we present a novel target-based lidar-camera extrinsic calibration methodology that can be used for non-overlapping field of view (FOV) sensors. Contrary to previous work, our methodology overcomes the non-overlapping FOV challenge using a motion capture system (MCS) instead of traditional simultaneous localization and mapping approaches. Due to the high relative precision of the MCS, our methodology can achieve both the high accuracy and repeatable calibrations of traditional target-based methods, regardless of the amount of overlap in the field of view of the sensors. We show using simulation that we can accurately recover extrinsic calibrations for a range of perturbations to the true calibration that would be expected in real circumstances. We also validate that high accuracy calibrations can be achieved on experimental data. Furthermore, We implement the described approach in an extensible way that allows any camera model, target shape, or feature extraction methodology to be used within our framework. We validate this implementation on two target shapes: an easy to construct cylinder target and a diamond target with a checkerboard. The cylinder target shape results show that our methodology can be used for degenerate target shapes where target poses cannot be fully constrained from a single observation, and distinct repeatable features need not be detected on the target.
A Gaussian process latent force model for joint input-state estimation in linear structural systems
Apr 02, 2019

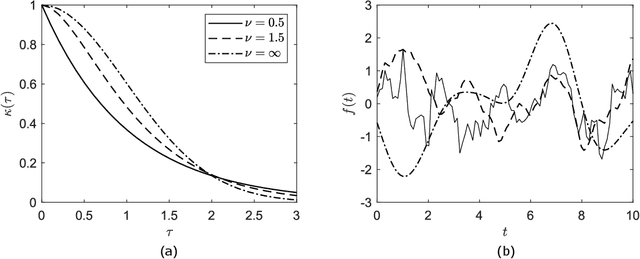
The problem of combined state and input estimation of linear structural systems based on measured responses and a priori knowledge of structural model is considered. A novel methodology using Gaussian process latent force models is proposed to tackle the problem in a stochastic setting. Gaussian process latent force models (GPLFMs) are hybrid models that combine differential equations representing a physical system with data-driven non-parametric Gaussian process models. In this work, the unknown input forces acting on a structure are modelled as Gaussian processes with some chosen covariance functions which are combined with the mechanistic differential equation representing the structure to construct a GPLFM. The GPLFM is then conveniently formulated as an augmented stochastic state-space model with additional states representing the latent force components, and the joint input and state inference of the resulting model is implemented using Kalman filter. The augmented state-space model of GPLFM is shown as a generalization of the class of input-augmented state-space models, is proven observable, and is robust compared to conventional augmented formulations in terms of numerical stability. The hyperparameters governing the covariance functions are estimated using maximum likelihood optimization based on the observed data, thus overcoming the need for manual tuning of the hyperparameters by trial-and-error. To assess the performance of the proposed GPLFM method, several cases of state and input estimation are demonstrated using numerical simulations on a 10-dof shear building and a 76-storey ASCE benchmark office tower. Results obtained indicate the superior performance of the proposed approach over conventional Kalman filter based approaches.