 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovie Recommendation using Web Crawling
Dec 14, 2024In today's digital world, streaming platforms offer a vast array of movies, making it hard for users to find content matching their preferences. This paper explores integrating real time data from popular movie websites using advanced HTML scraping techniques and APIs. It also incorporates a recommendation system trained on a static Kaggle dataset, enhancing the relevance and freshness of suggestions. By combining content based filtering, collaborative filtering, and a hybrid model, we create a system that utilizes both historical and real time data for more personalized suggestions. Our methodology shows that incorporating dynamic data not only boosts user satisfaction but also aligns recommendations with current viewing trends.
HITgram: A Platform for Experimenting with n-gram Language Models
Dec 14, 2024Large language models (LLMs) are powerful but resource intensive, limiting accessibility. HITgram addresses this gap by offering a lightweight platform for n-gram model experimentation, ideal for resource-constrained environments. It supports unigrams to 4-grams and incorporates features like context sensitive weighting, Laplace smoothing, and dynamic corpus management to e-hance prediction accuracy, even for unseen word sequences. Experiments demonstrate HITgram's efficiency, achieving 50,000 tokens/second and generating 2-grams from a 320MB corpus in 62 seconds. HITgram scales efficiently, constructing 4-grams from a 1GB file in under 298 seconds on an 8 GB RAM system. Planned enhancements include multilingual support, advanced smoothing, parallel processing, and model saving, further broadening its utility.
Edge Ranking of Graphs in Transportation Networks using a Graph Neural Network (GNN)
Mar 25, 2023Many networks, such as transportation, power, and water distribution, can be represented as graphs. Crucial challenge in graph representations is identifying the importance of graph edges and their influence on overall network efficiency and information flow performance. For example, important edges in a transportation network are those roads that, when affected, will significantly alter the network's overall efficiency. Commonly used approach to finding such important edges is ``edge betweenness centrality'' (EBC), an edge ranking measure to determine the influential edges of the graph based on connectivity and information spread. Computing the EBC utilizing the common Brandes algorithm involves calculating the shortest paths for every node pair, which can be computationally expensive and restrictive, especially for large graphs. Changes in the graph parameters, e.g., in the edge weight or the addition and deletion of nodes or edges, require the recalculation of the EBC. As the main contribution, we propose an approximate method to estimate the EBC using a Graph Neural Network (GNN), a deep learning-based approach. We show that it is computationally efficient compared to the conventional method, especially for large graphs. The proposed method of GNN-based edge ranking is evaluated on several synthetic graphs and a real-world transportation data set. We show that this framework can estimate the approximate edge ranking much faster compared to the conventional method. This approach is inductive, i.e., training and testing are performed on different sets of graphs with varying numbers of nodes and edges. The proposed method is especially suitable for applications on large-scale networks when edge information is desired, for example, in urban infrastructure improvement projects, power, and water network resilience analyses, and optimizing resource allocations in engineering networks.
AutoDrone: Shortest Optimized Obstacle-Free Path Planning for Autonomous Drones
Oct 30, 2021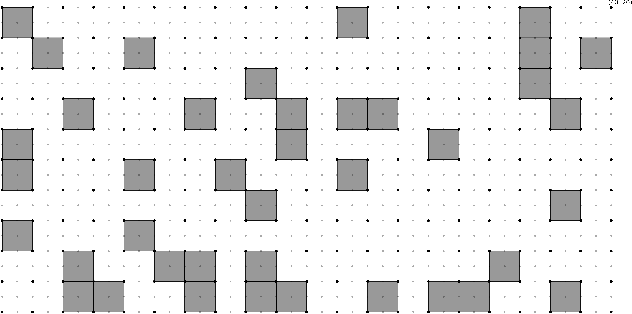
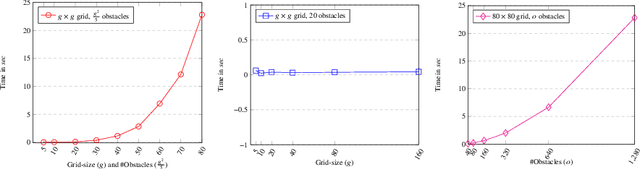
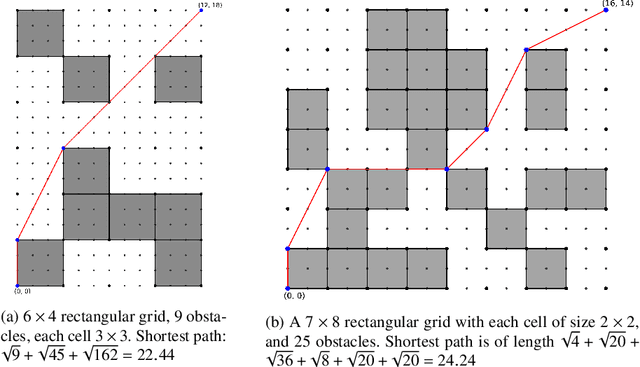
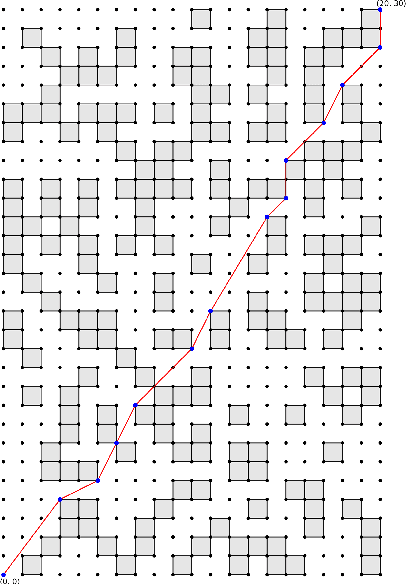
With technological advancement, drone has emerged as unmanned aerial vehicle that can be controlled by humans to fly or reach a destination. This may be autonomous as well, where the drone itself is intelligent enough to find a shortest obstacle-free path to reach the destination from a designated source. Be it a planned smart city or even a wreckage site affected by natural calamity, we may imagine the buildings, any surface-erected structure or other blockage as obstacles for the drone to fly in a direct line-of-sight path. So, the whole bird's eye-view of the landscape can be transformed to a graph of grid-cells, where some are occupied to indicate the obstacles and some are free to indicate the free path. The autonomous drone (AutoDrone) will be able to find out the shortest hindrance-free path while travelling in two-dimensional space and move from one place to another. In this paper, we propose a method to find out an obstacle-free shortest path in the coordinate system guided by GPS. This can be especially beneficial in rescue operations and fast delivery or pick-up in an energy-efficient way, where our algorithm will help in finding out the shortest path and angle along which it should fly. Our work shows different scenarios to path-tracing, through the shortest feasible path computed by the autonomous drone.