 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThompson Sampling in Online RLHF with General Function Approximation
May 29, 2025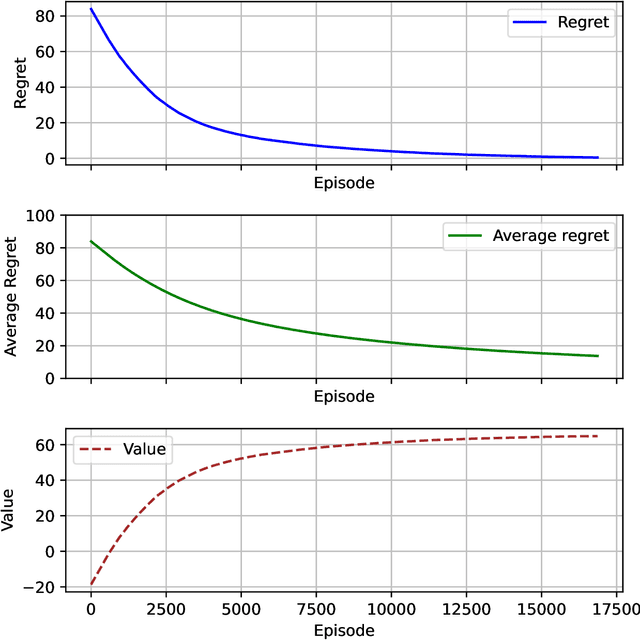
Reinforcement learning from human feedback (RLHF) has achieved great empirical success in aligning large language models (LLMs) with human preference, and it is of great importance to study the statistical efficiency of RLHF algorithms from a theoretical perspective. In this work, we consider the online RLHF setting where the preference data is revealed during the learning process and study action value function approximation. We design a model-free posterior sampling algorithm for online RLHF inspired by Thompson sampling and provide its theoretical guarantee. Specifically, we adopt Bellman eluder (BE) dimension as the complexity measure of the function class and establish $O(\sqrt{T})$ regret bound for the proposed algorithm with other multiplicative factor depending on the horizon, BE dimension and the $log$-bracketing number of the function class. Further, in the analysis, we first establish the concentration-type inequality of the squared Bellman error bound based on the maximum likelihood estimator (MLE) generalization bound, which plays the crucial rules in obtaining the eluder-type regret bound and may be of independent interest.
Offline Multitask Representation Learning for Reinforcement Learning
Mar 18, 2024
We study offline multitask representation learning in reinforcement learning (RL), where a learner is provided with an offline dataset from different tasks that share a common representation and is asked to learn the shared representation. We theoretically investigate offline multitask low-rank RL, and propose a new algorithm called MORL for offline multitask representation learning. Furthermore, we examine downstream RL in reward-free, offline and online scenarios, where a new task is introduced to the agent that shares the same representation as the upstream offline tasks. Our theoretical results demonstrate the benefits of using the learned representation from the upstream offline task instead of directly learning the representation of the low-rank model.
Model-Free Algorithm with Improved Sample Efficiency for Zero-Sum Markov Games
Aug 17, 2023The problem of two-player zero-sum Markov games has recently attracted increasing interests in theoretical studies of multi-agent reinforcement learning (RL). In particular, for finite-horizon episodic Markov decision processes (MDPs), it has been shown that model-based algorithms can find an $\epsilon$-optimal Nash Equilibrium (NE) with the sample complexity of $O(H^3SAB/\epsilon^2)$, which is optimal in the dependence of the horizon $H$ and the number of states $S$ (where $A$ and $B$ denote the number of actions of the two players, respectively). However, none of the existing model-free algorithms can achieve such an optimality. In this work, we propose a model-free stage-based Q-learning algorithm and show that it achieves the same sample complexity as the best model-based algorithm, and hence for the first time demonstrate that model-free algorithms can enjoy the same optimality in the $H$ dependence as model-based algorithms. The main improvement of the dependency on $H$ arises by leveraging the popular variance reduction technique based on the reference-advantage decomposition previously used only for single-agent RL. However, such a technique relies on a critical monotonicity property of the value function, which does not hold in Markov games due to the update of the policy via the coarse correlated equilibrium (CCE) oracle. Thus, to extend such a technique to Markov games, our algorithm features a key novel design of updating the reference value functions as the pair of optimistic and pessimistic value functions whose value difference is the smallest in the history in order to achieve the desired improvement in the sample efficiency.
Non-stationary Reinforcement Learning under General Function Approximation
Jun 01, 2023General function approximation is a powerful tool to handle large state and action spaces in a broad range of reinforcement learning (RL) scenarios. However, theoretical understanding of non-stationary MDPs with general function approximation is still limited. In this paper, we make the first such an attempt. We first propose a new complexity metric called dynamic Bellman Eluder (DBE) dimension for non-stationary MDPs, which subsumes majority of existing tractable RL problems in static MDPs as well as non-stationary MDPs. Based on the proposed complexity metric, we propose a novel confidence-set based model-free algorithm called SW-OPEA, which features a sliding window mechanism and a new confidence set design for non-stationary MDPs. We then establish an upper bound on the dynamic regret for the proposed algorithm, and show that SW-OPEA is provably efficient as long as the variation budget is not significantly large. We further demonstrate via examples of non-stationary linear and tabular MDPs that our algorithm performs better in small variation budget scenario than the existing UCB-type algorithms. To the best of our knowledge, this is the first dynamic regret analysis in non-stationary MDPs with general function approximation.
Provable Benefit of Multitask Representation Learning in Reinforcement Learning
Jun 13, 2022As representation learning becomes a powerful technique to reduce sample complexity in reinforcement learning (RL) in practice, theoretical understanding of its advantage is still limited. In this paper, we theoretically characterize the benefit of representation learning under the low-rank Markov decision process (MDP) model. We first study multitask low-rank RL (as upstream training), where all tasks share a common representation, and propose a new multitask reward-free algorithm called REFUEL. REFUEL learns both the transition kernel and the near-optimal policy for each task, and outputs a well-learned representation for downstream tasks. Our result demonstrates that multitask representation learning is provably more sample-efficient than learning each task individually, as long as the total number of tasks is above a certain threshold. We then study the downstream RL in both online and offline settings, where the agent is assigned with a new task sharing the same representation as the upstream tasks. For both online and offline settings, we develop a sample-efficient algorithm, and show that it finds a near-optimal policy with the suboptimality gap bounded by the sum of the estimation error of the learned representation in upstream and a vanishing term as the number of downstream samples becomes large. Our downstream results of online and offline RL further capture the benefit of employing the learned representation from upstream as opposed to learning the representation of the low-rank model directly. To the best of our knowledge, this is the first theoretical study that characterizes the benefit of representation learning in exploration-based reward-free multitask RL for both upstream and downstream tasks.