 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTAD: Spatio-Temporal Adjustment of Traffic-Oblivious Travel-Time Estimation
Jun 08, 2020



Travel time estimation is an important component in modern transportation applications. The state of the art techniques for travel time estimation use GPS traces to learn the weights of a road network, often modeled as a directed graph, then apply Dijkstra-like algorithms to find shortest paths. Travel time is then computed as the sum of edge weights on the returned path. In order to enable time-dependency, existing systems compute multiple weighted graphs corresponding to different time windows. These graphs are often optimized offline before they are deployed into production routing engines, causing a serious engineering overhead. In this paper, we present STAD, a system that adjusts - on the fly - travel time estimates for any trip request expressed in the form of origin, destination, and departure time. STAD uses machine learning and sparse trips data to learn the imperfections of any basic routing engine, before it turns it into a full-fledged time-dependent system capable of adjusting travel times to real traffic conditions in a city. STAD leverages the spatio-temporal properties of traffic by combining spatial features such as departing and destination geographic zones with temporal features such as departing time and day to significantly improve the travel time estimates of the basic routing engine. Experiments on real trip datasets from Doha, New York City, and Porto show a reduction in median absolute errors of 14% in the first two cities and 29% in the latter. We also show that STAD performs better than different commercial and research baselines in all three cities.
RoadTagger: Robust Road Attribute Inference with Graph Neural Networks
Dec 28, 2019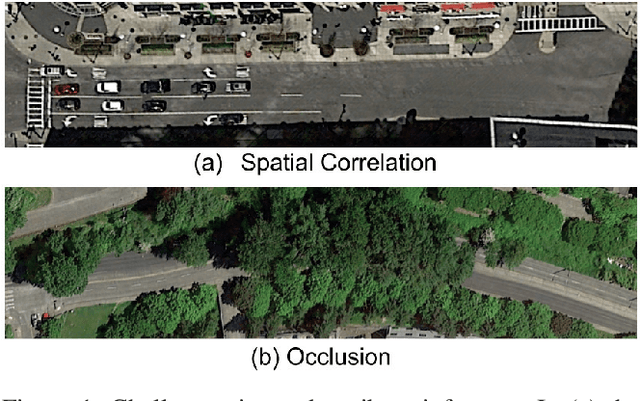
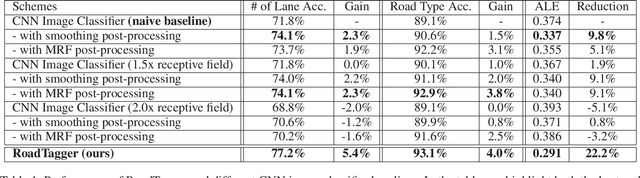
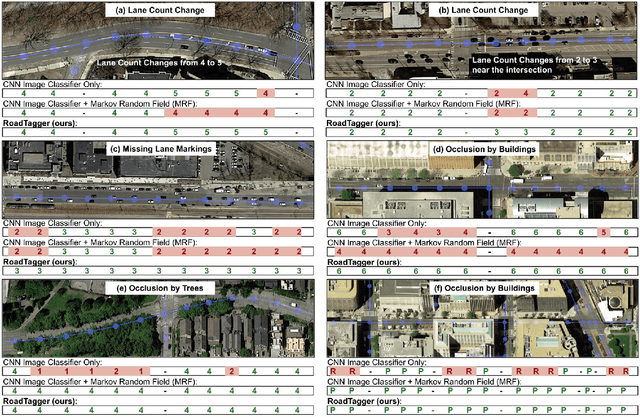
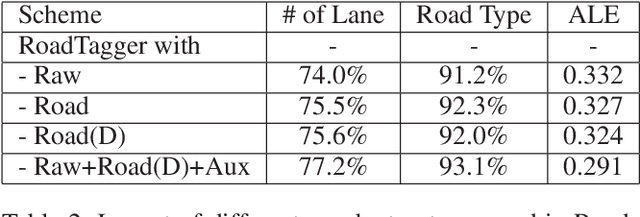
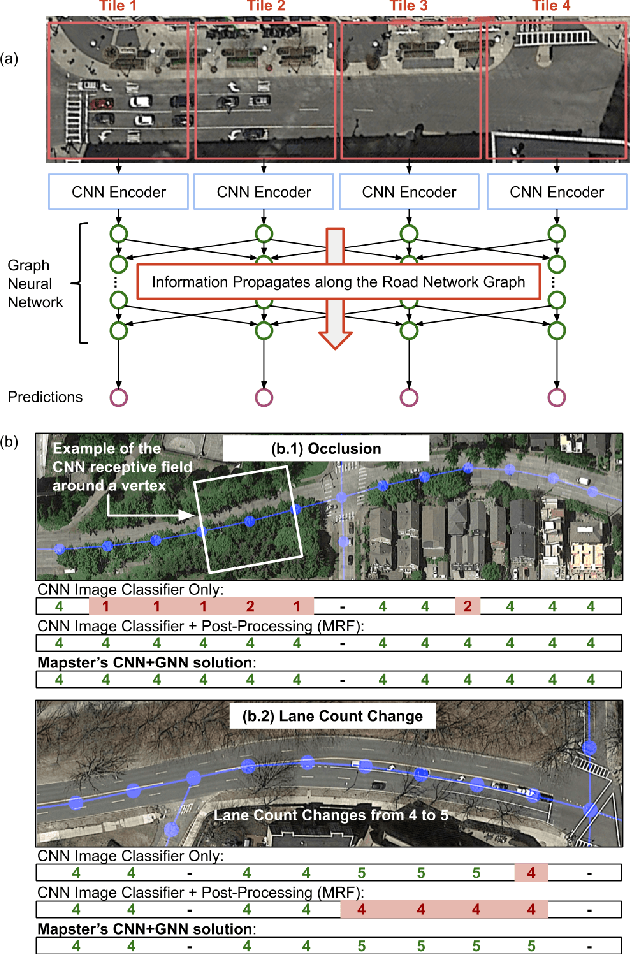
Inferring road attributes such as lane count and road type from satellite imagery is challenging. Often, due to the occlusion in satellite imagery and the spatial correlation of road attributes, a road attribute at one position on a road may only be apparent when considering far-away segments of the road. Thus, to robustly infer road attributes, the model must integrate scattered information and capture the spatial correlation of features along roads. Existing solutions that rely on image classifiers fail to capture this correlation, resulting in poor accuracy. We find this failure is caused by a fundamental limitation -- the limited effective receptive field of image classifiers. To overcome this limitation, we propose RoadTagger, an end-to-end architecture which combines both Convolutional Neural Networks (CNNs) and Graph Neural Networks (GNNs) to infer road attributes. The usage of graph neural networks allows information propagation on the road network graph and eliminates the receptive field limitation of image classifiers. We evaluate RoadTagger on both a large real-world dataset covering 688 km^2 area in 20 U.S. cities and a synthesized micro-dataset. In the evaluation, RoadTagger improves inference accuracy over the CNN image classifier based approaches. RoadTagger also demonstrates strong robustness against different disruptions in the satellite imagery and the ability to learn complicated inductive rules for aggregating scattered information along the road network.
Inferring and Improving Street Maps with Data-Driven Automation
Nov 06, 2019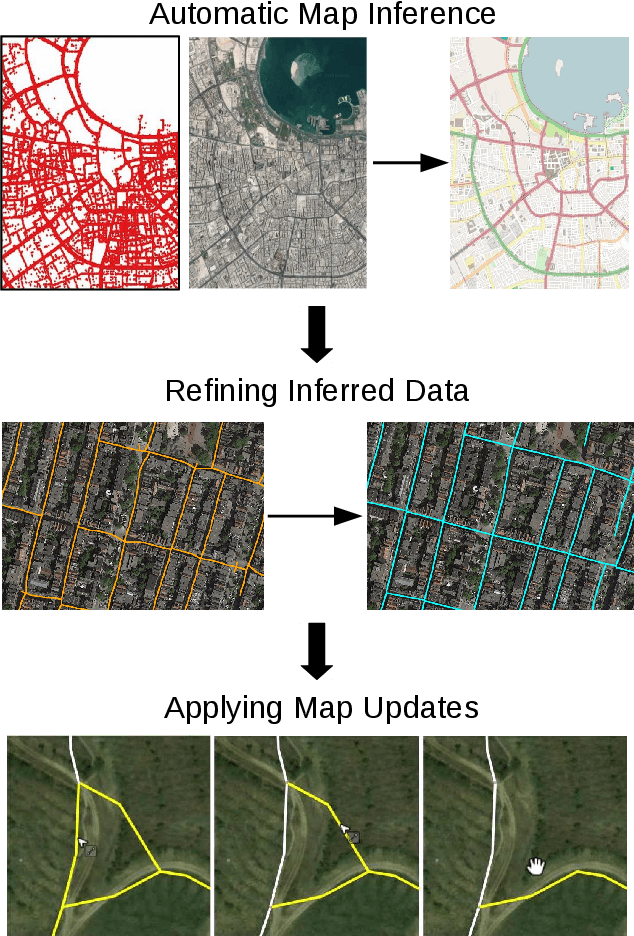
Street maps are a crucial data source that help to inform a wide range of decisions, from navigating a city to disaster relief and urban planning. However, in many parts of the world, street maps are incomplete or lag behind new construction. Editing maps today involves a tedious process of manually tracing and annotating roads, buildings, and other map features. Over the past decade, many automatic map inference systems have been proposed to automatically extract street map data from satellite imagery, aerial imagery, and GPS trajectory datasets. However, automatic map inference has failed to gain traction in practice due to two key limitations: high error rates (low precision), which manifest in noisy inference outputs, and a lack of end-to-end system design to leverage inferred data to update existing street maps. At MIT and QCRI, we have developed a number of algorithms and approaches to address these challenges, which we combined into a new system we call Mapster. Mapster is a human-in-the-loop street map editing system that incorporates three components to robustly accelerate the mapping process over traditional tools and workflows: high-precision automatic map inference, data refinement, and machine-assisted map editing. Through an evaluation on a large-scale dataset including satellite imagery, GPS trajectories, and ground-truth map data in forty cities, we show that Mapster makes automation practical for map editing, and enables the curation of map datasets that are more complete and up-to-date at less cost.
Machine-Assisted Map Editing
Jun 17, 2019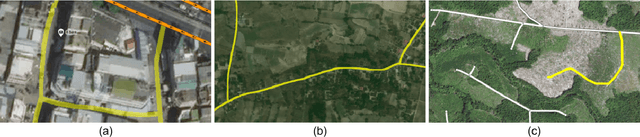
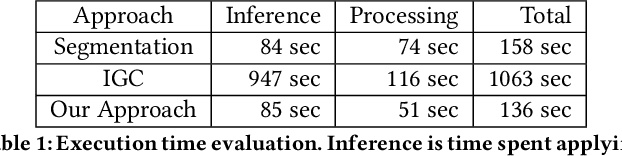
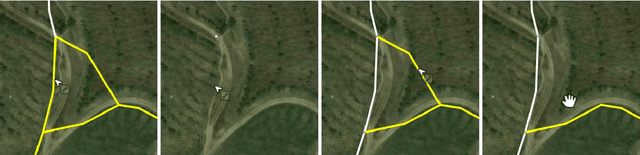

Mapping road networks today is labor-intensive. As a result, road maps have poor coverage outside urban centers in many countries. Systems to automatically infer road network graphs from aerial imagery and GPS trajectories have been proposed to improve coverage of road maps. However, because of high error rates, these systems have not been adopted by mapping communities. We propose machine-assisted map editing, where automatic map inference is integrated into existing, human-centric map editing workflows. To realize this, we build Machine-Assisted iD (MAiD), where we extend the web-based OpenStreetMap editor, iD, with machine-assistance functionality. We complement MAiD with a novel approach for inferring road topology from aerial imagery that combines the speed of prior segmentation approaches with the accuracy of prior iterative graph construction methods. We design MAiD to tackle the addition of major, arterial roads in regions where existing maps have poor coverage, and the incremental improvement of coverage in regions where major roads are already mapped. We conduct two user studies and find that, when participants are given a fixed time to map roads, they are able to add as much as 3.5x more roads with MAiD.
RoadTracer: Automatic Extraction of Road Networks from Aerial Images
Apr 26, 2018



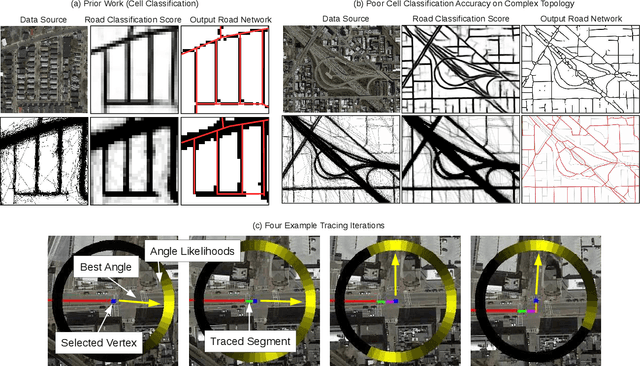
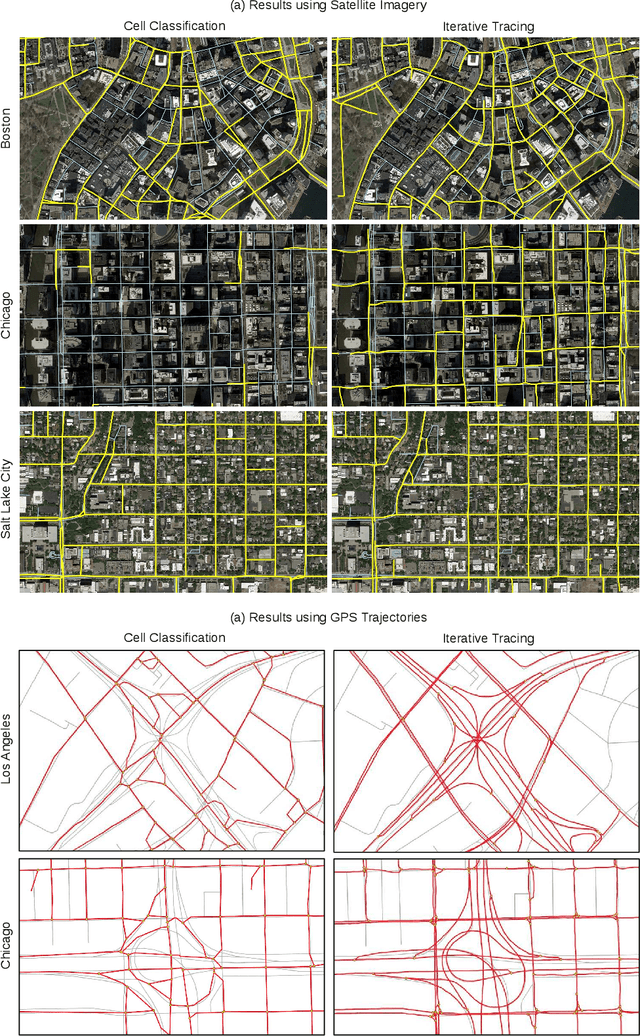
Mapping road networks is currently both expensive and labor-intensive. High-resolution aerial imagery provides a promising avenue to automatically infer a road network. Prior work uses convolutional neural networks (CNNs) to detect which pixels belong to a road (segmentation), and then uses complex post-processing heuristics to infer graph connectivity. We show that these segmentation methods have high error rates because noisy CNN outputs are difficult to correct. We propose RoadTracer, a new method to automatically construct accurate road network maps from aerial images. RoadTracer uses an iterative search process guided by a CNN-based decision function to derive the road network graph directly from the output of the CNN. We compare our approach with a segmentation method on fifteen cities, and find that at a 5% error rate, RoadTracer correctly captures 45% more junctions across these cities.