 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring and Improving Street Maps with Data-Driven Automation
Paper and Code
Nov 06, 2019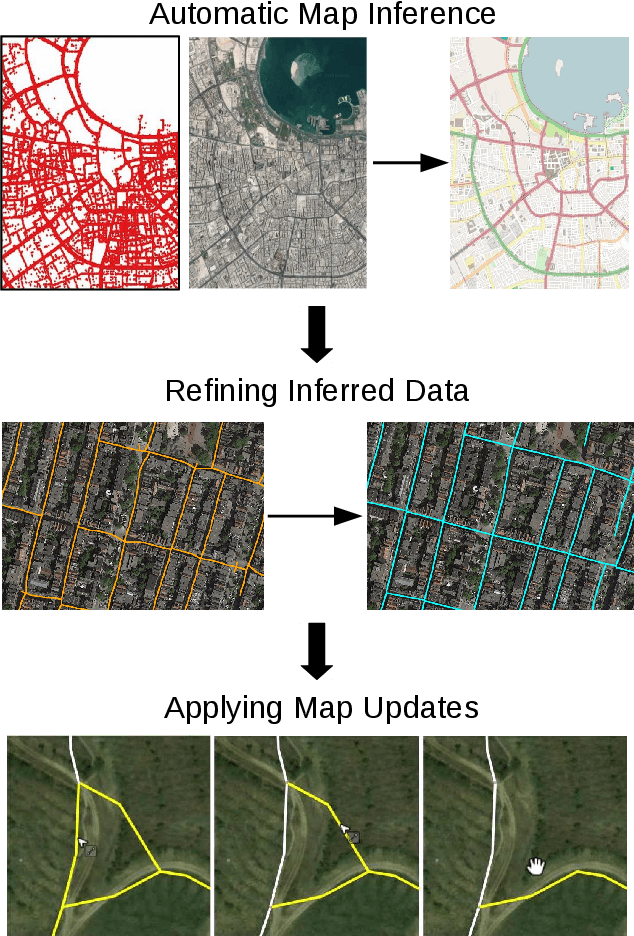
Street maps are a crucial data source that help to inform a wide range of decisions, from navigating a city to disaster relief and urban planning. However, in many parts of the world, street maps are incomplete or lag behind new construction. Editing maps today involves a tedious process of manually tracing and annotating roads, buildings, and other map features. Over the past decade, many automatic map inference systems have been proposed to automatically extract street map data from satellite imagery, aerial imagery, and GPS trajectory datasets. However, automatic map inference has failed to gain traction in practice due to two key limitations: high error rates (low precision), which manifest in noisy inference outputs, and a lack of end-to-end system design to leverage inferred data to update existing street maps. At MIT and QCRI, we have developed a number of algorithms and approaches to address these challenges, which we combined into a new system we call Mapster. Mapster is a human-in-the-loop street map editing system that incorporates three components to robustly accelerate the mapping process over traditional tools and workflows: high-precision automatic map inference, data refinement, and machine-assisted map editing. Through an evaluation on a large-scale dataset including satellite imagery, GPS trajectories, and ground-truth map data in forty cities, we show that Mapster makes automation practical for map editing, and enables the curation of map datasets that are more complete and up-to-date at less cost.