 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Constraint Synthesis for Adaptive Trajectory Optimization via Large Language Models
Jun 02, 2026Trajectory optimization is a critical component for enabling safe and reliable autonomous operations in space exploration. As space missions increase in frequency, complexity, and scope, there is a growing need to rapidly formulate mathematically sound trajectory optimization problems that accurately reflect mission objectives and operational constraints. However, translating mission intent into tractable analytical formulations for trajectory optimization requires substantial domain expertise. This paper presents a framework that leverages large language models (LLMs) to translate natural language descriptions of mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations. Experiments in spacecraft rendezvous scenarios demonstrate a high success rate in reconditioning a convex trajectory optimization problem from semantic mission requirements. Ultimately, this work highlights the potential of LLMs to bridge high-level intent and formal optimization models, enabling more flexible and efficient trajectory design of spacecraft.
Improved 3D Gaussian Splatting of Unknown Spacecraft Structure Using Space Environment Illumination Knowledge
Dec 30, 2025This work presents a novel pipeline to recover the 3D structure of an unknown target spacecraft from a sequence of images captured during Rendezvous and Proximity Operations (RPO) in space. The target's geometry and appearance are represented as a 3D Gaussian Splatting (3DGS) model. However, learning 3DGS requires static scenes, an assumption in contrast to dynamic lighting conditions encountered in spaceborne imagery. The trained 3DGS model can also be used for camera pose estimation through photometric optimization. Therefore, in addition to recovering a geometrically accurate 3DGS model, the photometric accuracy of the rendered images is imperative to downstream pose estimation tasks during the RPO process. This work proposes to incorporate the prior knowledge of the Sun's position, estimated and maintained by the servicer spacecraft, into the training pipeline for improved photometric quality of 3DGS rasterization. Experimental studies demonstrate the effectiveness of the proposed solution, as 3DGS models trained on a sequence of images learn to adapt to rapidly changing illumination conditions in space and reflect global shadowing and self-occlusion.
Semantic Trajectory Generation for Goal-Oriented Spacecraft Rendezvous
Dec 11, 2025Reliable real-time trajectory generation is essential for future autonomous spacecraft. While recent progress in nonconvex guidance and control is paving the way for onboard autonomous trajectory optimization, these methods still rely on extensive expert input (e.g., waypoints, constraints, mission timelines, etc.), which limits the operational scalability in real rendezvous missions. This paper introduces SAGES (Semantic Autonomous Guidance Engine for Space), a trajectory-generation framework that translates natural-language commands into spacecraft trajectories that reflect high-level intent while respecting nonconvex constraints. Experiments in two settings -- fault-tolerant proximity operations with continuous-time constraint enforcement and a free-flying robotic platform -- demonstrate that SAGES reliably produces trajectories aligned with human commands, achieving over 90% semantic-behavioral consistency across diverse behavior modes. Ultimately, this work marks an initial step toward language-conditioned, constraint-aware spacecraft trajectory generation, enabling operators to interactively guide both safety and behavior through intuitive natural-language commands with reduced expert burden.
Digital and Robotic Twinning for Validation of Proximity Operations and Formation Flying
Jul 26, 2025In spacecraft Rendezvous, Proximity Operations (RPO), and Formation Flying (FF), the Guidance Navigation and Control (GNC) system is safety-critical and must meet strict performance requirements. However, validating such systems is challenging due to the complexity of the space environment, necessitating a verification and validation (V&V) process that bridges simulation and real-world behavior. The key contribution of this paper is a unified, end-to-end digital and robotic twinning framework that enables software- and hardware-in-the-loop testing for multi-modal GNC systems. The robotic twin includes three testbeds at Stanford's Space Rendezvous Laboratory (SLAB): the GNSS and Radiofrequency Autonomous Navigation Testbed for Distributed Space Systems (GRAND) to validate RF-based navigation techniques, and the Testbed for Rendezvous and Optical Navigation (TRON) and Optical Stimulator (OS) to validate vision-based methods. The test article for this work is an integrated multi-modal GNC software stack for RPO and FF developed at SLAB. This paper introduces the hybrid framework and summarizes calibration and error characterization for the robotic twin. Then, the GNC stack's performance and robustness is characterized using the integrated digital and robotic twinning pipeline for a full-range RPO mission scenario in Low-Earth Orbit (LEO). The results shown in the paper demonstrate consistency between digital and robotic twins, validating the hybrid twinning pipeline as a reliable framework for realistic assessment and verification of GNC systems.
Event-Driven Simulation for Rapid Iterative Development of Distributed Space Flight Software
May 18, 2025This paper presents the design, development, and application of a novel space simulation environment for rapidly prototyping and testing flight software for distributed space systems. The environment combines the flexibility, determinism, and observability of software-only simulation with the fidelity and depth normally attained only by real-time hardware-in-the-loop testing. Ultimately, this work enables an engineering process in which flight software is continuously improved and delivered in its final, flight-ready form, and which reduces the cost of design changes and software revisions with respect to a traditional linear development process. Three key methods not found in existing tools enable this environment's novel capabilities: first, a hybrid event-driven simulation architecture that combines continuous-time and discrete-event simulation paradigms; second, a lightweight application-layer software virtualization design that allows executing compiled flight software binaries while modeling process scheduling, input/output, and memory use; and third, high-fidelity models for the multi-spacecraft space environment, including for wireless communication, relative sensing such as differential GPS and cameras, and flight computer health metrics like heap exhaustion and fragmentation. The simulation environment's capabilities are applied to the iterative development and testing of two flight-ready software packages: the guidance, navigation, and control software for the VISORS mission, and the Stanford Space Rendezvous Laboratory software kit for rendezvous and proximity operations. Results from 33 months of flight software development demonstrate the use of this simulation environment to rapidly and reliably identify and resolve defects, characterize navigation and control performance, and scrutinize implementation details like memory allocation and inter-spacecraft network protocols.
Transformer-based Model Predictive Control: Trajectory Optimization via Sequence Modeling
Oct 31, 2024



Model predictive control (MPC) has established itself as the primary methodology for constrained control, enabling general-purpose robot autonomy in diverse real-world scenarios. However, for most problems of interest, MPC relies on the recursive solution of highly non-convex trajectory optimization problems, leading to high computational complexity and strong dependency on initialization. In this work, we present a unified framework to combine the main strengths of optimization-based and learning-based methods for MPC. Our approach entails embedding high-capacity, transformer-based neural network models within the optimization process for trajectory generation, whereby the transformer provides a near-optimal initial guess, or target plan, to a non-convex optimization problem. Our experiments, performed in simulation and the real world onboard a free flyer platform, demonstrate the capabilities of our framework to improve MPC convergence and runtime. Compared to purely optimization-based approaches, results show that our approach can improve trajectory generation performance by up to 75%, reduce the number of solver iterations by up to 45%, and improve overall MPC runtime by 7x without loss in performance.
* 8 pages, 7 figures. Datasets, videos and code available at: https://transformermpc.github.io
Generalizable Spacecraft Trajectory Generation via Multimodal Learning with Transformers
Oct 15, 2024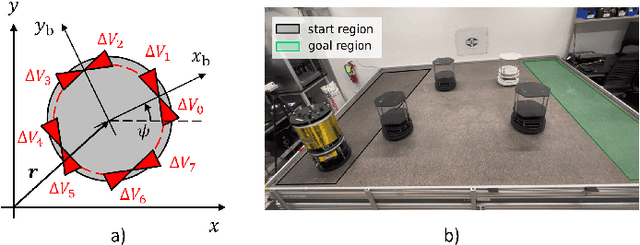
Effective trajectory generation is essential for reliable on-board spacecraft autonomy. Among other approaches, learning-based warm-starting represents an appealing paradigm for solving the trajectory generation problem, effectively combining the benefits of optimization- and data-driven methods. Current approaches for learning-based trajectory generation often focus on fixed, single-scenario environments, where key scene characteristics, such as obstacle positions or final-time requirements, remain constant across problem instances. However, practical trajectory generation requires the scenario to be frequently reconfigured, making the single-scenario approach a potentially impractical solution. To address this challenge, we present a novel trajectory generation framework that generalizes across diverse problem configurations, by leveraging high-capacity transformer neural networks capable of learning from multimodal data sources. Specifically, our approach integrates transformer-based neural network models into the trajectory optimization process, encoding both scene-level information (e.g., obstacle locations, initial and goal states) and trajectory-level constraints (e.g., time bounds, fuel consumption targets) via multimodal representations. The transformer network then generates near-optimal initial guesses for non-convex optimization problems, significantly enhancing convergence speed and performance. The framework is validated through extensive simulations and real-world experiments on a free-flyer platform, achieving up to 30% cost improvement and 80% reduction in infeasible cases with respect to traditional approaches, and demonstrating robust generalization across diverse scenario variations.
Towards Robust Spacecraft Trajectory Optimization via Transformers
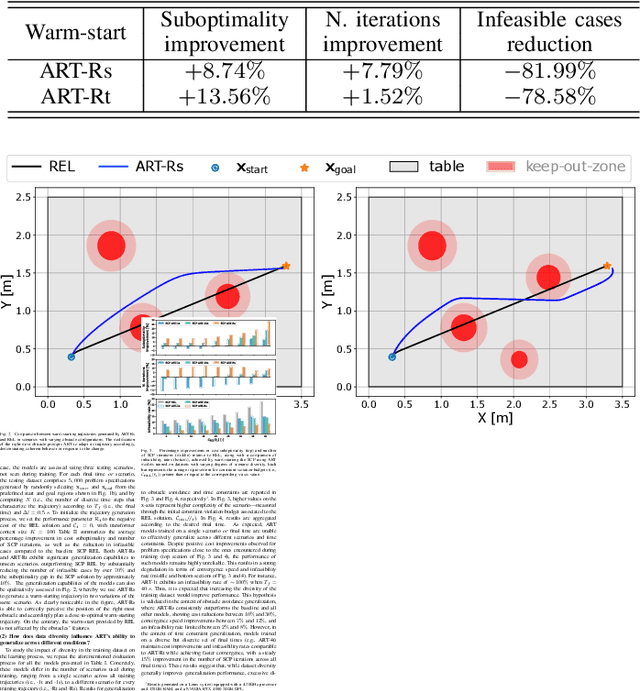
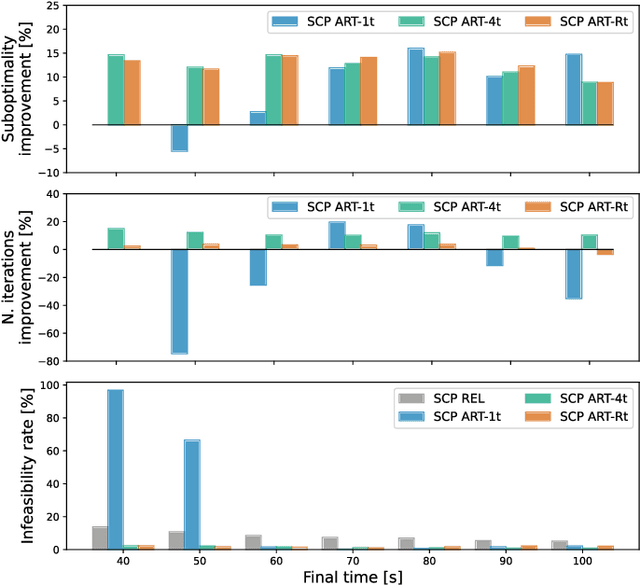
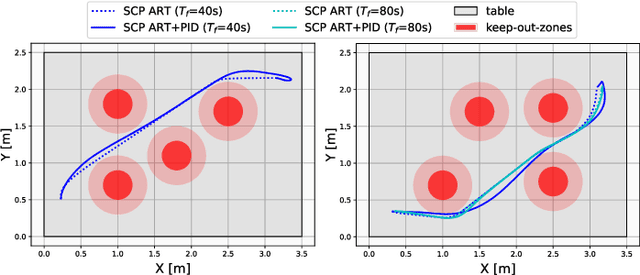
Oct 08, 2024Future multi-spacecraft missions require robust autonomous trajectory optimization capabilities to ensure safe and efficient rendezvous operations. This capability hinges on solving non-convex optimal control problems in real time, although traditional iterative methods such as sequential convex programming impose significant computational challenges. To mitigate this burden, the Autonomous Rendezvous Transformer introduced a generative model trained to provide near-optimal initial guesses. This approach provides convergence to better local optima (e.g., fuel optimality), improves feasibility rates, and results in faster convergence speed of optimization algorithms through warm-starting. This work extends the capabilities of ART to address robust chance-constrained optimal control problems. Specifically, ART is applied to challenging rendezvous scenarios in Low Earth Orbit (LEO), ensuring fault-tolerant behavior under uncertainty. Through extensive experimentation, the proposed warm-starting strategy is shown to consistently produce high-quality reference trajectories, achieving up to 30% cost improvement and 50% reduction in infeasible cases compared to conventional methods, demonstrating robust performance across multiple state representations. Additionally, a post hoc evaluation framework is proposed to assess the quality of generated trajectories and mitigate runtime failures, marking an initial step toward the reliable deployment of AI-driven solutions in safety-critical autonomous systems such as spacecraft.
Bridging Domain Gap for Flight-Ready Spaceborne Vision
Sep 18, 2024



This work presents Spacecraft Pose Network v3 (SPNv3), a Neural Network (NN) for monocular pose estimation of a known, non-cooperative target spacecraft. As opposed to existing literature, SPNv3 is designed and trained to be computationally efficient while providing robustness to spaceborne images that have not been observed during offline training and validation on the ground. These characteristics are essential to deploying NNs on space-grade edge devices. They are achieved through careful NN design choices, and an extensive trade-off analysis reveals features such as data augmentation, transfer learning and vision transformer architecture as a few of those that contribute to simultaneously maximizing robustness and minimizing computational overhead. Experiments demonstrate that the final SPNv3 can achieve state-of-the-art pose accuracy on hardware-in-the-loop images from a robotic testbed while having trained exclusively on computer-generated synthetic images, effectively bridging the domain gap between synthetic and real imagery. At the same time, SPNv3 runs well above the update frequency of modern satellite navigation filters when tested on a representative graphical processing unit system with flight heritage. Overall, SPNv3 is an efficient, flight-ready NN model readily applicable to a wide range of close-range rendezvous and proximity operations with target resident space objects. The code implementation of SPNv3 will be made publicly available.
Adapting a Foundation Model for Space-based Tasks
Aug 12, 2024



Foundation models, e.g., large language models, possess attributes of intelligence which offer promise to endow a robot with the contextual understanding necessary to navigate complex, unstructured tasks in the wild. In the future of space robotics, we see three core challenges which motivate the use of a foundation model adapted to space-based applications: 1) Scalability of ground-in-the-loop operations; 2) Generalizing prior knowledge to novel environments; and 3) Multi-modality in tasks and sensor data. Therefore, as a first-step towards building a foundation model for space-based applications, we automatically label the AI4Mars dataset to curate a language annotated dataset of visual-question-answer tuples. We fine-tune a pretrained LLaVA checkpoint on this dataset to endow a vision-language model with the ability to perform spatial reasoning and navigation on Mars' surface. In this work, we demonstrate that 1) existing vision-language models are deficient visual reasoners in space-based applications, and 2) fine-tuning a vision-language model on extraterrestrial data significantly improves the quality of responses even with a limited training dataset of only a few thousand samples.