 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved 3D Gaussian Splatting of Unknown Spacecraft Structure Using Space Environment Illumination Knowledge
Dec 30, 2025This work presents a novel pipeline to recover the 3D structure of an unknown target spacecraft from a sequence of images captured during Rendezvous and Proximity Operations (RPO) in space. The target's geometry and appearance are represented as a 3D Gaussian Splatting (3DGS) model. However, learning 3DGS requires static scenes, an assumption in contrast to dynamic lighting conditions encountered in spaceborne imagery. The trained 3DGS model can also be used for camera pose estimation through photometric optimization. Therefore, in addition to recovering a geometrically accurate 3DGS model, the photometric accuracy of the rendered images is imperative to downstream pose estimation tasks during the RPO process. This work proposes to incorporate the prior knowledge of the Sun's position, estimated and maintained by the servicer spacecraft, into the training pipeline for improved photometric quality of 3DGS rasterization. Experimental studies demonstrate the effectiveness of the proposed solution, as 3DGS models trained on a sequence of images learn to adapt to rapidly changing illumination conditions in space and reflect global shadowing and self-occlusion.
Bridging Domain Gap for Flight-Ready Spaceborne Vision
Sep 18, 2024



This work presents Spacecraft Pose Network v3 (SPNv3), a Neural Network (NN) for monocular pose estimation of a known, non-cooperative target spacecraft. As opposed to existing literature, SPNv3 is designed and trained to be computationally efficient while providing robustness to spaceborne images that have not been observed during offline training and validation on the ground. These characteristics are essential to deploying NNs on space-grade edge devices. They are achieved through careful NN design choices, and an extensive trade-off analysis reveals features such as data augmentation, transfer learning and vision transformer architecture as a few of those that contribute to simultaneously maximizing robustness and minimizing computational overhead. Experiments demonstrate that the final SPNv3 can achieve state-of-the-art pose accuracy on hardware-in-the-loop images from a robotic testbed while having trained exclusively on computer-generated synthetic images, effectively bridging the domain gap between synthetic and real imagery. At the same time, SPNv3 runs well above the update frequency of modern satellite navigation filters when tested on a representative graphical processing unit system with flight heritage. Overall, SPNv3 is an efficient, flight-ready NN model readily applicable to a wide range of close-range rendezvous and proximity operations with target resident space objects. The code implementation of SPNv3 will be made publicly available.
Event-based Structure-from-Orbit
May 10, 2024



Event sensors offer high temporal resolution visual sensing, which makes them ideal for perceiving fast visual phenomena without suffering from motion blur. Certain applications in robotics and vision-based navigation require 3D perception of an object undergoing circular or spinning motion in front of a static camera, such as recovering the angular velocity and shape of the object. The setting is equivalent to observing a static object with an orbiting camera. In this paper, we propose event-based structure-from-orbit (eSfO), where the aim is to simultaneously reconstruct the 3D structure of a fast spinning object observed from a static event camera, and recover the equivalent orbital motion of the camera. Our contributions are threefold: since state-of-the-art event feature trackers cannot handle periodic self-occlusion due to the spinning motion, we develop a novel event feature tracker based on spatio-temporal clustering and data association that can better track the helical trajectories of valid features in the event data. The feature tracks are then fed to our novel factor graph-based structure-from-orbit back-end that calculates the orbital motion parameters (e.g., spin rate, relative rotational axis) that minimize the reprojection error. For evaluation, we produce a new event dataset of objects under spinning motion. Comparisons against ground truth indicate the efficacy of eSfO.
Online Supervised Training of Spaceborne Vision during Proximity Operations using Adaptive Kalman Filtering
Sep 20, 2023This work presents an Online Supervised Training (OST) method to enable robust vision-based navigation about a non-cooperative spacecraft. Spaceborne Neural Networks (NN) are susceptible to domain gap as they are primarily trained with synthetic images due to the inaccessibility of space. OST aims to close this gap by training a pose estimation NN online using incoming flight images during Rendezvous and Proximity Operations (RPO). The pseudo-labels are provided by adaptive unscented Kalman filter where the NN is used in the loop as a measurement module. Specifically, the filter tracks the target's relative orbital and attitude motion, and its accuracy is ensured by robust on-ground training of the NN using only synthetic data. The experiments on real hardware-in-the-loop trajectory images show that OST can improve the NN performance on the target image domain given that OST is performed on images of the target viewed from a diverse set of directions during RPO.
Adaptive Neural Network-based Unscented Kalman Filter for Spacecraft Pose Tracking at Rendezvous
Jun 08, 2022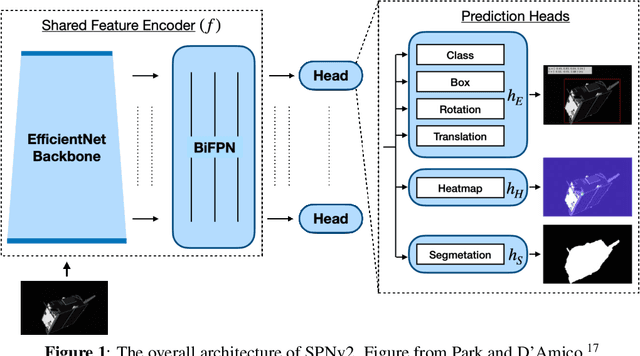

This paper presents a neural network-based Unscented Kalman Filter (UKF) to track the pose (i.e., position and orientation) of a known, noncooperative, tumbling target spacecraft in a close-proximity rendezvous scenario. The UKF estimates the relative orbital and attitude states of the target with respect to the servicer based on the pose information extracted from incoming monocular images of the target spacecraft with a Convolutional Neural Network (CNN). In order to enable reliable tracking, the process noise covariance matrix of the UKF is tuned online using adaptive state noise compensation. Specifically, the closed-form process noise model for the relative attitude dynamics is newly derived and implemented. In order to enable a comprehensive analysis of the performance and robustness of the proposed CNN-powered UKF, this paper also introduces the Satellite Hardware-In-the-loop Rendezvous Trajectories (SHIRT) dataset which comprises the labeled imagery of two representative rendezvous trajectories in low Earth orbit. For each trajectory, two sets of images are respectively created from a graphics renderer and a robotic testbed to allow testing the filter's robustness across domain gap. The proposed UKF is evaluated on both domains of the trajectories in SHIRT and is shown to have sub-decimeter-level position and degree-level orientation errors at steady-state.
Robust Multi-Task Learning and Online Refinement for Spacecraft Pose Estimation across Domain Gap
Mar 08, 2022



This work presents Spacecraft Pose Network v2 (SPNv2), a Convolutional Neural Network (CNN) for pose estimation of noncooperative spacecraft across domain gap. SPNv2 is a multi-scale, multi-task CNN which consists of a shared multi-scale feature encoder and multiple prediction heads that perform different tasks on a shared feature output. These tasks are all related to detection and pose estimation of a target spacecraft from an image, such as prediction of pre-defined satellite keypoints, direct pose regression, and binary segmentation of the satellite foreground. It is shown that by jointly training on different yet related tasks with extensive data augmentations on synthetic images only, the shared encoder learns features that are common across image domains that have fundamentally different visual characteristics compared to synthetic images. This work also introduces Online Domain Refinement (ODR) which refines the parameters of the normalization layers of SPNv2 on the target domain images online at deployment. Specifically, ODR performs self-supervised entropy minimization of the predicted satellite foreground, thereby improving the CNN's performance on the target domain images without their pose labels and with minimal computational efforts. The GitHub repository for SPNv2 will be made available in the near future.
SPEED+: Next Generation Dataset for Spacecraft Pose Estimation across Domain Gap
Oct 06, 2021
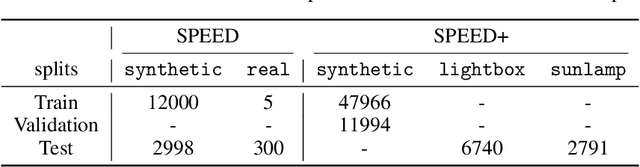

Autonomous vision-based spaceborne navigation is an enabling technology for future on-orbit servicing and space logistics missions. While computer vision in general has benefited from Machine Learning (ML), training and validating spaceborne ML models are extremely challenging due to the impracticality of acquiring a large-scale labeled dataset of images of the intended target in the space environment. Existing datasets, such as Spacecraft PosE Estimation Dataset (SPEED), have so far mostly relied on synthetic images for both training and validation, which are easy to mass-produce but fail to resemble the visual features and illumination variability inherent to the target spaceborne images. In order to bridge the gap between the current practices and the intended applications in future space missions, this paper introduces SPEED+: the next generation spacecraft pose estimation dataset with specific emphasis on domain gap. In addition to 60,000 synthetic images for training, SPEED+ includes 9,531 simulated images of a spacecraft mockup model captured from the Testbed for Rendezvous and Optical Navigation (TRON) facility. TRON is a first-of-a-kind robotic testbed capable of capturing an arbitrary number of target images with accurate and maximally diverse pose labels and high-fidelity spaceborne illumination conditions. SPEED+ will be used in the upcoming international Satellite Pose Estimation Challenge co-hosted with the Advanced Concepts Team of the European Space Agency to evaluate and compare the robustness of spaceborne ML models trained on synthetic images.
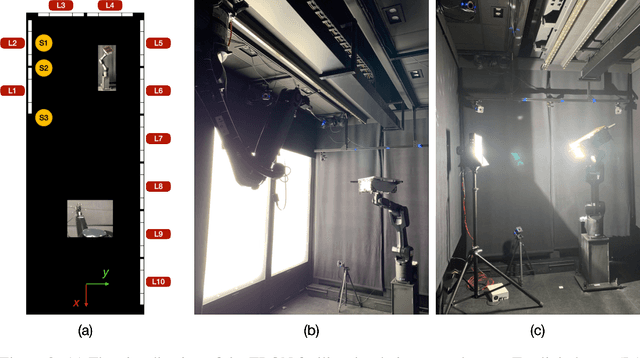
Robotic Testbed for Rendezvous and Optical Navigation: Multi-Source Calibration and Machine Learning Use Cases
Aug 12, 2021


This work presents the most recent advances of the Robotic Testbed for Rendezvous and Optical Navigation (TRON) at Stanford University - the first robotic testbed capable of validating machine learning algorithms for spaceborne optical navigation. The TRON facility consists of two 6 degrees-of-freedom KUKA robot arms and a set of Vicon motion track cameras to reconfigure an arbitrary relative pose between a camera and a target mockup model. The facility includes multiple Earth albedo light boxes and a sun lamp to recreate the high-fidelity spaceborne illumination conditions. After the overview of the facility, this work details the multi-source calibration procedure which enables the estimation of the relative pose between the object and the camera with millimeter-level position and millidegree-level orientation accuracies. Finally, a comparative analysis of the synthetic and TRON simulated imageries is performed using a Convolutional Neural Network (CNN) pre-trained on the synthetic images. The result shows a considerable gap in the CNN's performance, suggesting the TRON simulated images can be used to validate the robustness of any machine learning algorithms trained on more easily accessible synthetic imagery from computer graphics.
Satellite Pose Estimation Challenge: Dataset, Competition Design and Results
Nov 05, 2019

Reliable pose estimation of uncooperative satellites is a key technology for enabling future on-orbit servicing and debris removal missions. The Kelvins Satellite Pose Estimation Challenge aims at evaluating and comparing monocular vision-based approaches and pushing the state-of-the-art on this problem. This work is based on the Satellite Pose Estimation Dataset, the first publicly available machine learning set of synthetic and real spacecraft imagery. The choice of dataset reflects one of the unique challenges associated with spaceborne computer vision tasks, namely the lack of spaceborne images to train and validate the developed algorithms. This work briefly reviews the basic properties and the collection process of the dataset which was made publicly available. The competition design, including the definition of performance metrics and the adopted testbed, is also discussed. Furthermore, the submissions of the 48 participants are analyzed to compare the performance of their approaches and uncover what factors make the satellite pose estimation problem especially challenging.
Towards Robust Learning-Based Pose Estimation of Noncooperative Spacecraft
Sep 01, 2019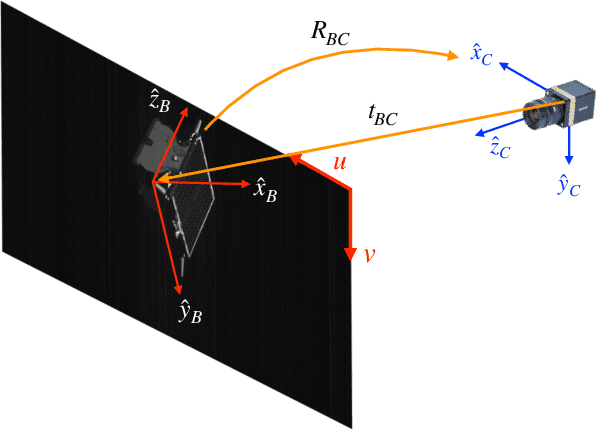

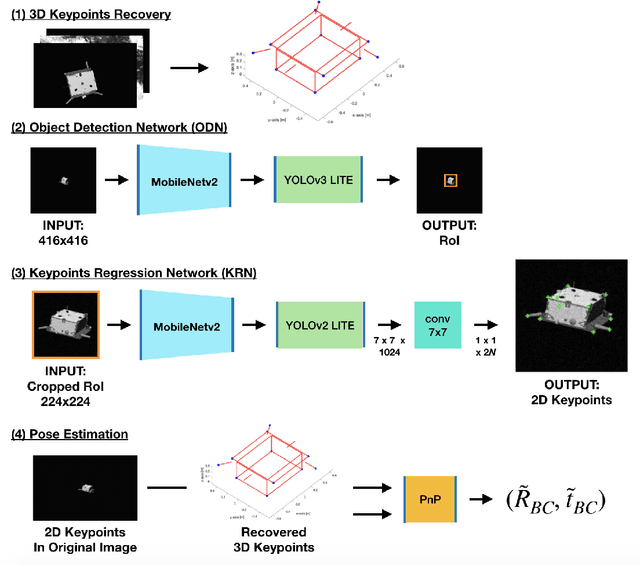

This work presents a novel Convolutional Neural Network (CNN) architecture and a training procedure to enable robust and accurate pose estimation of a noncooperative spacecraft. First, a new CNN architecture is introduced that has scored a fourth place in the recent Pose Estimation Challenge hosted by Stanford's Space Rendezvous Laboratory (SLAB) and the Advanced Concepts Team (ACT) of the European Space Agency (ESA). The proposed architecture first detects the object by regressing a 2D bounding box, then a separate network regresses the 2D locations of the known surface keypoints from an image of the target cropped around the detected Region-of-Interest (RoI). In a single-image pose estimation problem, the extracted 2D keypoints can be used in conjunction with corresponding 3D model coordinates to compute relative pose via the Perspective-n-Point (PnP) problem. These keypoint locations have known correspondences to those in the 3D model, since the CNN is trained to predict the corners in a pre-defined order, allowing for bypassing the computationally expensive feature matching processes. This work also introduces and explores the texture randomization to train a CNN for spaceborne applications. Specifically, Neural Style Transfer (NST) is applied to randomize the texture of the spacecraft in synthetically rendered images. It is shown that using the texture-randomized images of spacecraft for training improves the network's performance on spaceborne images without exposure to them during training. It is also shown that when using the texture-randomized spacecraft images during training, regressing 3D bounding box corners leads to better performance on spaceborne images than regressing surface keypoints, as NST inevitably distorts the spacecraft's geometric features to which the surface keypoints have closer relation.