 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Structure-from-Orbit
May 10, 2024



Event sensors offer high temporal resolution visual sensing, which makes them ideal for perceiving fast visual phenomena without suffering from motion blur. Certain applications in robotics and vision-based navigation require 3D perception of an object undergoing circular or spinning motion in front of a static camera, such as recovering the angular velocity and shape of the object. The setting is equivalent to observing a static object with an orbiting camera. In this paper, we propose event-based structure-from-orbit (eSfO), where the aim is to simultaneously reconstruct the 3D structure of a fast spinning object observed from a static event camera, and recover the equivalent orbital motion of the camera. Our contributions are threefold: since state-of-the-art event feature trackers cannot handle periodic self-occlusion due to the spinning motion, we develop a novel event feature tracker based on spatio-temporal clustering and data association that can better track the helical trajectories of valid features in the event data. The feature tracks are then fed to our novel factor graph-based structure-from-orbit back-end that calculates the orbital motion parameters (e.g., spin rate, relative rotational axis) that minimize the reprojection error. For evaluation, we produce a new event dataset of objects under spinning motion. Comparisons against ground truth indicate the efficacy of eSfO.
Towards Bridging the Space Domain Gap for Satellite Pose Estimation using Event Sensing
Sep 24, 2022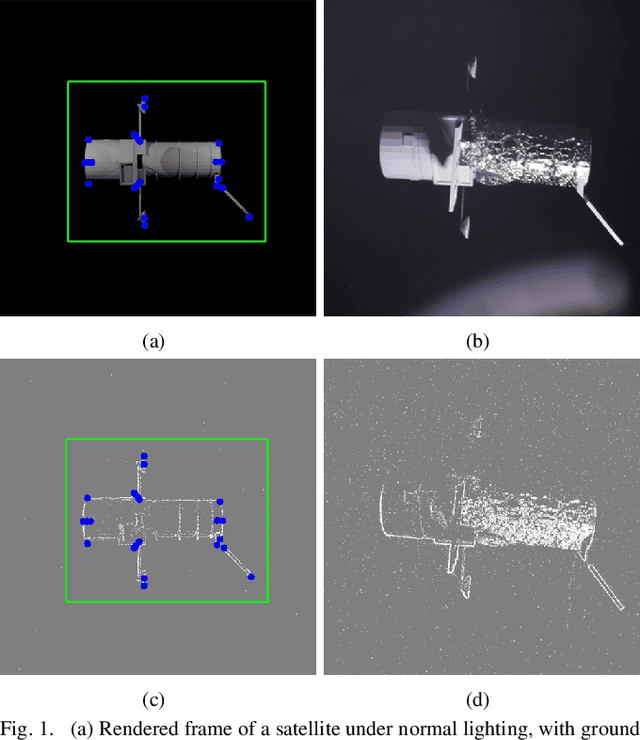
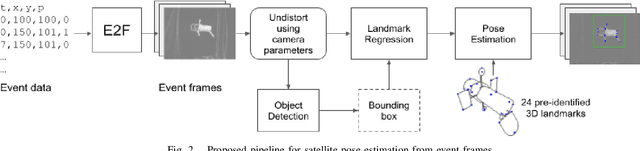
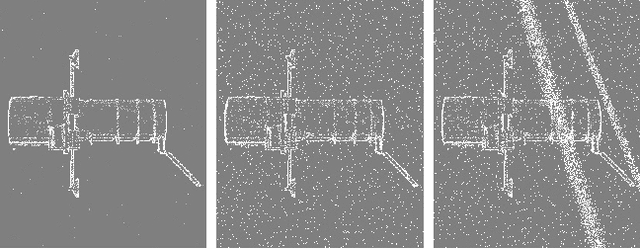
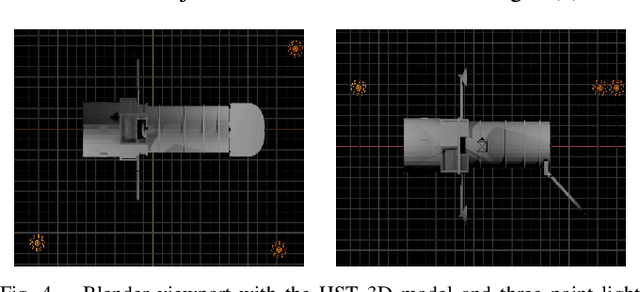
Deep models trained using synthetic data require domain adaptation to bridge the gap between the simulation and target environments. State-of-the-art domain adaptation methods often demand sufficient amounts of (unlabelled) data from the target domain. However, this need is difficult to fulfil when the target domain is an extreme environment, such as space. In this paper, our target problem is close proximity satellite pose estimation, where it is costly to obtain images of satellites from actual rendezvous missions. We demonstrate that event sensing offers a promising solution to generalise from the simulation to the target domain under stark illumination differences. Our main contribution is an event-based satellite pose estimation technique, trained purely on synthetic event data with basic data augmentation to improve robustness against practical (noisy) event sensors. Underpinning our method is a novel dataset with carefully calibrated ground truth, comprising of real event data obtained by emulating satellite rendezvous scenarios in the lab under drastic lighting conditions. Results on the dataset showed that our event-based satellite pose estimation method, trained only on synthetic data without adaptation, could generalise to the target domain effectively.