 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Bridging the Space Domain Gap for Satellite Pose Estimation using Event Sensing
Paper and Code
Sep 24, 2022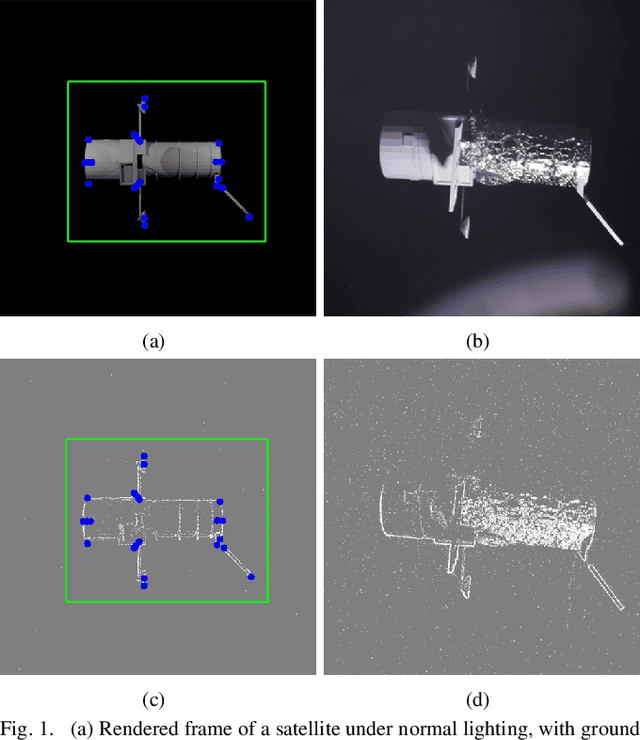
Deep models trained using synthetic data require domain adaptation to bridge the gap between the simulation and target environments. State-of-the-art domain adaptation methods often demand sufficient amounts of (unlabelled) data from the target domain. However, this need is difficult to fulfil when the target domain is an extreme environment, such as space. In this paper, our target problem is close proximity satellite pose estimation, where it is costly to obtain images of satellites from actual rendezvous missions. We demonstrate that event sensing offers a promising solution to generalise from the simulation to the target domain under stark illumination differences. Our main contribution is an event-based satellite pose estimation technique, trained purely on synthetic event data with basic data augmentation to improve robustness against practical (noisy) event sensors. Underpinning our method is a novel dataset with carefully calibrated ground truth, comprising of real event data obtained by emulating satellite rendezvous scenarios in the lab under drastic lighting conditions. Results on the dataset showed that our event-based satellite pose estimation method, trained only on synthetic data without adaptation, could generalise to the target domain effectively.