 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Bayesian equipment condition monitoring via simulation based inference: applications to heat exchanger health
Apr 22, 2026Accurate condition monitoring of industrial equipment requires inferring latent degradation parameters from indirect sensor measurements under uncertainty. While traditional Bayesian methods like Markov Chain Monte Carlo (MCMC) provide rigorous uncertainty quantification, their heavy computational bottlenecks render them impractical for real-time process control. To overcome this limitation, we propose an AI-driven framework utilizing Simulation-Based Inference (SBI) powered by amortized neural posterior estimation to diagnose complex failure modes in heat exchangers. By training neural density estimators on a simulated dataset, our approach learns a direct, likelihood-free mapping from thermal-fluid observations to the full posterior distribution of degradation parameters. We benchmark this framework against an MCMC baseline across various synthetic fouling and leakage scenarios, including challenging low-probability, sparse-event failures. The results show that SBI achieves comparable diagnostic accuracy and reliable uncertainty quantification, while accelerating inference time by a factor of82$\times$ compared to traditional sampling. The amortized nature of the neural network enables near-instantaneous inference, establishing SBI as a highly scalable, real-time alternative for probabilistic fault diagnosis and digital twin realization in complex engineering systems.
Unreliable Uncertainty Estimates with Monte Carlo Dropout
Dec 16, 2025Reliable uncertainty estimation is crucial for machine learning models, especially in safety-critical domains. While exact Bayesian inference offers a principled approach, it is often computationally infeasible for deep neural networks. Monte Carlo dropout (MCD) was proposed as an efficient approximation to Bayesian inference in deep learning by applying neuron dropout at inference time \citep{gal2016dropout}. Hence, the method generates multiple sub-models yielding a distribution of predictions to estimate uncertainty. We empirically investigate its ability to capture true uncertainty and compare to Gaussian Processes (GP) and Bayesian Neural Networks (BNN). We find that MCD struggles to accurately reflect the underlying true uncertainty, particularly failing to capture increased uncertainty in extrapolation and interpolation regions as observed in Bayesian models. The findings suggest that uncertainty estimates from MCD, as implemented and evaluated in these experiments, is not as reliable as those from traditional Bayesian approaches for capturing epistemic and aleatoric uncertainty.
Recency-Weighted Temporally-Segmented Ensemble for Time-Series Modeling
Mar 04, 2024



Time-series modeling in process industries faces the challenge of dealing with complex, multi-faceted, and evolving data characteristics. Conventional single model approaches often struggle to capture the interplay of diverse dynamics, resulting in suboptimal forecasts. Addressing this, we introduce the Recency-Weighted Temporally-Segmented (ReWTS, pronounced `roots') ensemble model, a novel chunk-based approach for multi-step forecasting. The key characteristics of the ReWTS model are twofold: 1) It facilitates specialization of models into different dynamics by segmenting the training data into `chunks' of data and training one model per chunk. 2) During inference, an optimization procedure assesses each model on the recent past and selects the active models, such that the appropriate mixture of previously learned dynamics can be recalled to forecast the future. This method not only captures the nuances of each period, but also adapts more effectively to changes over time compared to conventional `global' models trained on all data in one go. We present a comparative analysis, utilizing two years of data from a wastewater treatment plant and a drinking water treatment plant in Norway, demonstrating the ReWTS ensemble's superiority. It consistently outperforms the global model in terms of mean squared forecasting error across various model architectures by 10-70\% on both datasets, notably exhibiting greater resilience to outliers. This approach shows promise in developing automatic, adaptable forecasting models for decision-making and control systems in process industries and other complex systems.
Road Graph Generator: Mapping roads at construction sites from GPS data
Feb 15, 2024
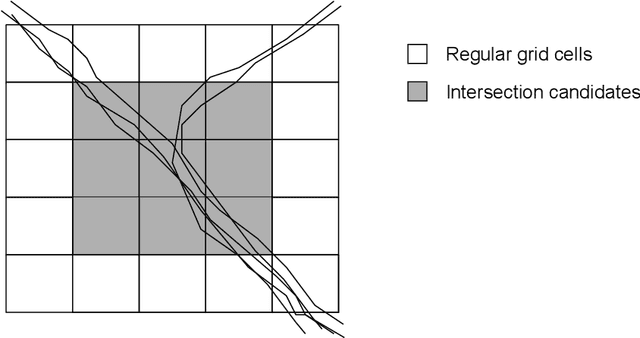


We present a method for road inference from GPS trajectories to map construction sites. This task introduces a unique challenge due to the erratic and non-standard movement patterns of construction machinery, which diverge significantly from typical vehicular traffic on established roads. Our method first identifies intersections in the road network that serve as critical decision points, and later connects them with edges, producing a graph, which subsequently can be used for planning and task-allocation. We demonstrate the effectiveness of our approach by mapping roads at a real-life construction site in Norway.
DON-LSTM: Multi-Resolution Learning with DeepONets and Long Short-Term Memory Neural Networks
Oct 03, 2023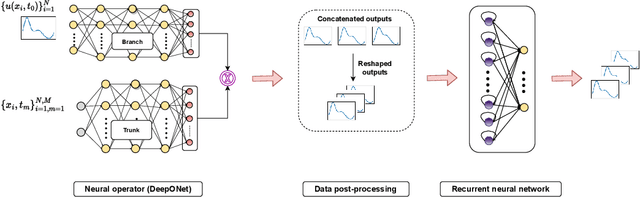
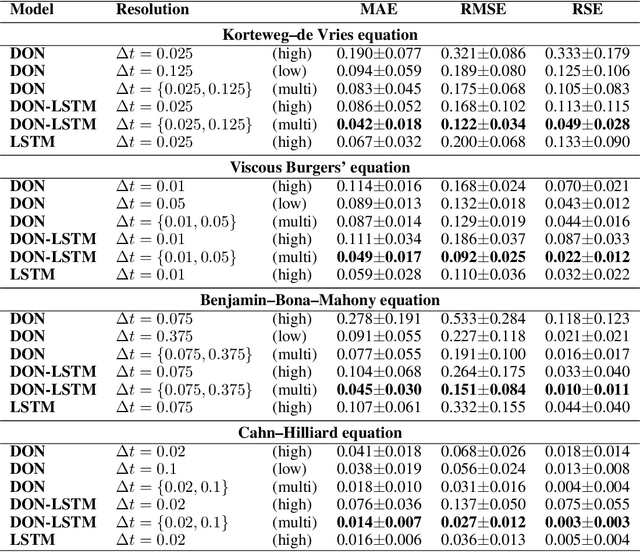
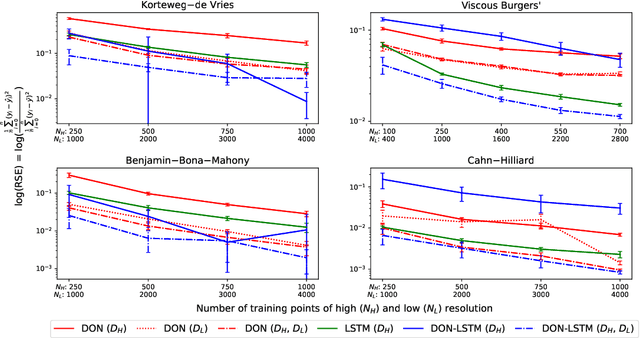
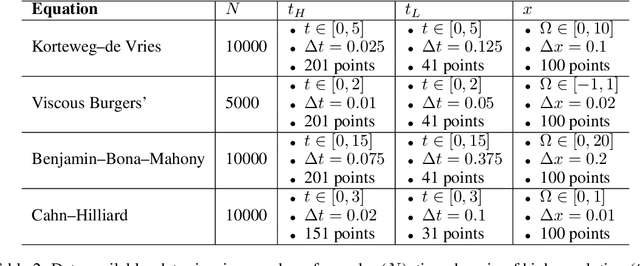
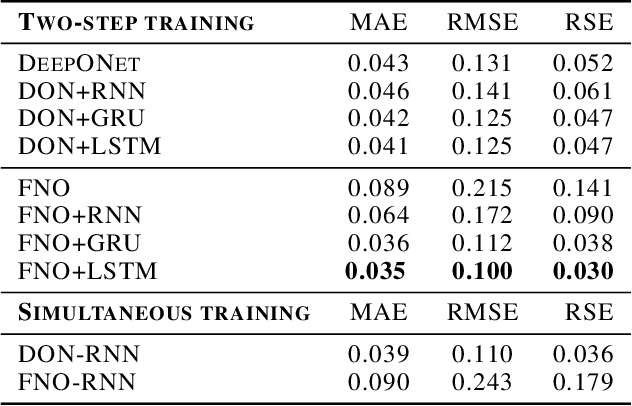
Deep operator networks (DeepONets, DONs) offer a distinct advantage over traditional neural networks in their ability to be trained on multi-resolution data. This property becomes especially relevant in real-world scenarios where high-resolution measurements are difficult to obtain, while low-resolution data is more readily available. Nevertheless, DeepONets alone often struggle to capture and maintain dependencies over long sequences compared to other state-of-the-art algorithms. We propose a novel architecture, named DON-LSTM, which extends the DeepONet with a long short-term memory network (LSTM). Combining these two architectures, we equip the network with explicit mechanisms to leverage multi-resolution data, as well as capture temporal dependencies in long sequences. We test our method on long-time-evolution modeling of multiple non-linear systems and show that the proposed multi-resolution DON-LSTM achieves significantly lower generalization error and requires fewer high-resolution samples compared to its vanilla counterparts.
Pseudo-Hamiltonian system identification
May 09, 2023



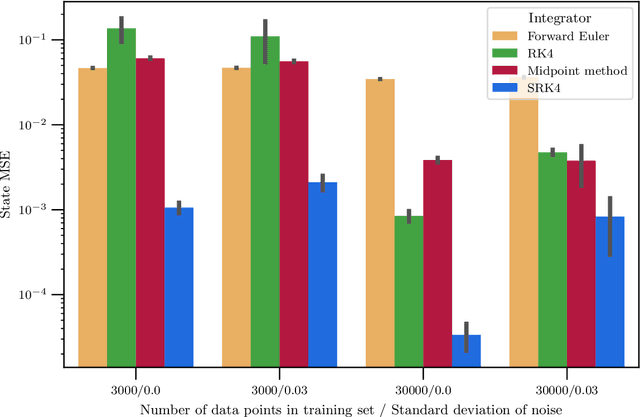
Identifying the underlying dynamics of physical systems can be challenging when only provided with observational data. In this work, we consider systems that can be modelled as first-order ordinary differential equations. By assuming a certain pseudo-Hamiltonian formulation, we are able to learn the analytic terms of internal dynamics even if the model is trained on data where the system is affected by unknown damping and external disturbances. In cases where it is difficult to find analytic terms for the disturbances, a hybrid model that uses a neural network to learn these can still accurately identify the dynamics of the system as if under ideal conditions. This makes the models applicable in situations where other system identification models fail. Furthermore, we propose to use a fourth-order symmetric integration scheme in the loss function and avoid actual integration in the training, and demonstrate on varied examples how this leads to increased performance on noisy data.
Neural Operator Learning for Long-Time Integration in Dynamical Systems with Recurrent Neural Networks
Mar 03, 2023


Deep neural networks are an attractive alternative for simulating complex dynamical systems, as in comparison to traditional scientific computing methods, they offer reduced computational costs during inference and can be trained directly from observational data. Existing methods, however, cannot extrapolate accurately and are prone to error accumulation in long-time integration. Herein, we address this issue by combining neural operators with recurrent neural networks to construct a novel and effective architecture, resulting in superior accuracy compared to the state-of-the-art. The new hybrid model is based on operator learning while offering a recurrent structure to capture temporal dependencies. The integrated framework is shown to stabilize the solution and reduce error accumulation for both interpolation and extrapolation of the Korteweg-de Vries equation.
Port-Hamiltonian Neural Networks with State Dependent Ports
Jun 06, 2022
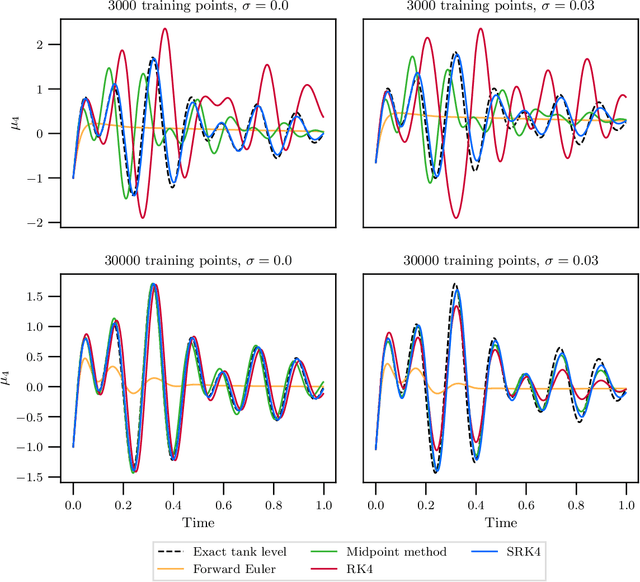
Hybrid machine learning based on Hamiltonian formulations has recently been successfully demonstrated for simple mechanical systems. In this work, we stress-test the method on both simple mass-spring systems and more complex and realistic systems with several internal and external forces, including a system with multiple connected tanks. We quantify performance under various conditions and show that imposing different assumptions greatly affect the performance during training presenting advantages and limitations of the method. We demonstrate that port-Hamiltonian neural networks can be extended to larger dimensions with state-dependent ports. We consider learning on systems with known and unknown external forces and show how it can be used to detect deviations in a system and still provide a valid model when the deviations are removed. Finally, we propose a symmetric high-order integrator for improved training on sparse and noisy data.
Mutual information estimation for graph convolutional neural networks
Mar 31, 2022


Measuring model performance is a key issue for deep learning practitioners. However, we often lack the ability to explain why a specific architecture attains superior predictive accuracy for a given data set. Often, validation accuracy is used as a performance heuristic quantifying how well a network generalizes to unseen data, but it does not capture anything about the information flow in the model. Mutual information can be used as a measure of the quality of internal representations in deep learning models, and the information plane may provide insights into whether the model exploits the available information in the data. The information plane has previously been explored for fully connected neural networks and convolutional architectures. We present an architecture-agnostic method for tracking a network's internal representations during training, which are then used to create the mutual information plane. The method is exemplified for graph-based neural networks fitted on citation data. We compare how the inductive bias introduced in graph-based architectures changes the mutual information plane relative to a fully connected neural network.
* Northern Lights Deep Learning proceedings, 8 pages, 3 figures
Inferring feature importance with uncertainties in high-dimensional data
Sep 20, 2021

Estimating feature importance is a significant aspect of explaining data-based models. Besides explaining the model itself, an equally relevant question is which features are important in the underlying data generating process. We present a Shapley value based framework for inferring the importance of individual features, including uncertainty in the estimator. We build upon the recently published feature importance measure of SAGE (Shapley additive global importance) and introduce sub-SAGE which can be estimated without resampling for tree-based models. We argue that the uncertainties can be estimated from bootstrapping and demonstrate the approach for tree ensemble methods. The framework is exemplified on synthetic data as well as high-dimensional genomics data.