Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Graph Generator: Mapping roads at construction sites from GPS data
Paper and Code
Feb 15, 2024
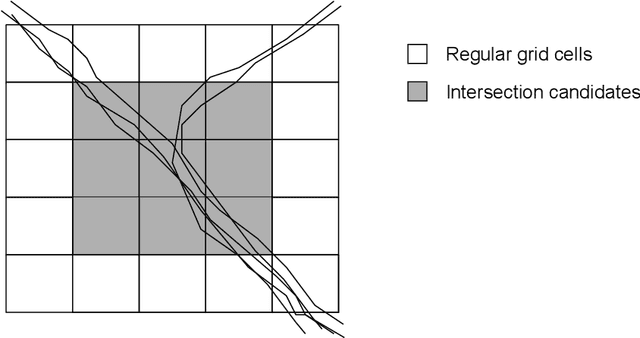


We present a method for road inference from GPS trajectories to map construction sites. This task introduces a unique challenge due to the erratic and non-standard movement patterns of construction machinery, which diverge significantly from typical vehicular traffic on established roads. Our method first identifies intersections in the road network that serve as critical decision points, and later connects them with edges, producing a graph, which subsequently can be used for planning and task-allocation. We demonstrate the effectiveness of our approach by mapping roads at a real-life construction site in Norway.
* 16 pages, 3 figures
View paper on