 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePort-Hamiltonian Neural Networks with State Dependent Ports
Jun 06, 2022
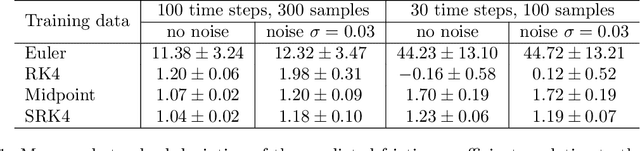
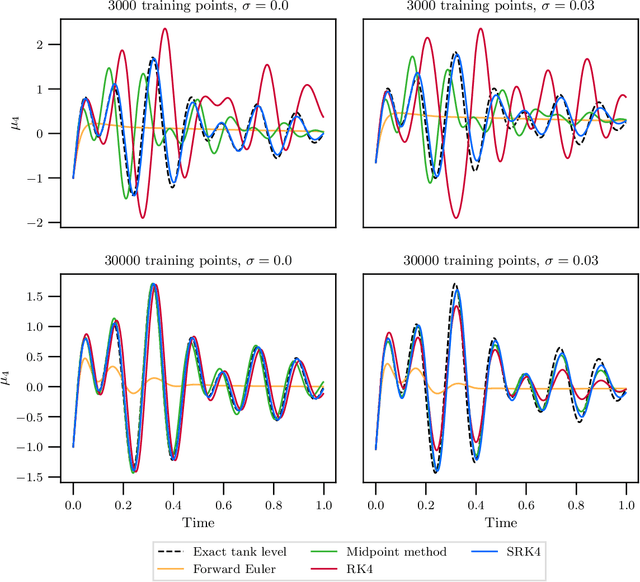
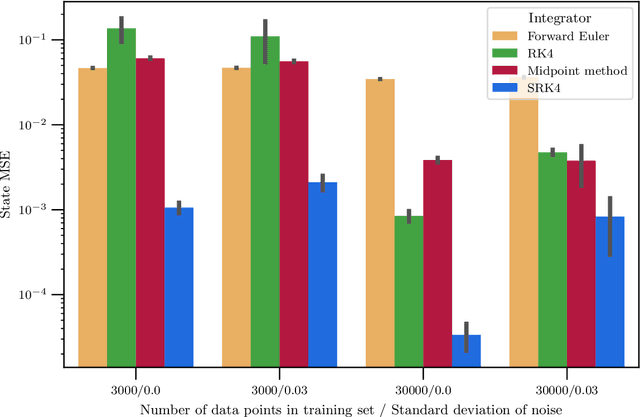
Hybrid machine learning based on Hamiltonian formulations has recently been successfully demonstrated for simple mechanical systems. In this work, we stress-test the method on both simple mass-spring systems and more complex and realistic systems with several internal and external forces, including a system with multiple connected tanks. We quantify performance under various conditions and show that imposing different assumptions greatly affect the performance during training presenting advantages and limitations of the method. We demonstrate that port-Hamiltonian neural networks can be extended to larger dimensions with state-dependent ports. We consider learning on systems with known and unknown external forces and show how it can be used to detect deviations in a system and still provide a valid model when the deviations are removed. Finally, we propose a symmetric high-order integrator for improved training on sparse and noisy data.
Proportional integral derivative controller assisted reinforcement learning for path following by autonomous underwater vehicles
Feb 03, 2020



Control theory provides engineers with a multitude of tools to design controllers that manipulate the closed-loop behavior and stability of dynamical systems. These methods rely heavily on insights about the mathematical model governing the physical system. However, if a system is highly complex, it might be infeasible to produce a reliable mathematical model of the system. Without a model most of the theoretical tools to develop control laws break down. In these settings, machine learning controllers become attractive: Controllers that can learn and adapt to complex systems, developing control laws where the engineer cannot. This article focuses on utilizing machine learning controllers in practical applications, specifically using deep reinforcement learning in motion control systems for an autonomous underwater vehicle with six degrees-of-freedom. Two methods are considered: end-to-end learning, where the vehicle is left entirely alone to explore the solution space in its search for an optimal policy, and PID assisted learning, where the DRL controller is essentially split into three separate parts, each controlling its own actuator.