 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Poisson Surface Reconstruction with One Solve using Geometric Gaussian Processes
Mar 24, 2025Poisson Surface Reconstruction is a widely-used algorithm for reconstructing a surface from an oriented point cloud. To facilitate applications where only partial surface information is available, or scanning is performed sequentially, a recent line of work proposes to incorporate uncertainty into the reconstructed surface via Gaussian process models. The resulting algorithms first perform Gaussian process interpolation, then solve a set of volumetric partial differential equations globally in space, resulting in a computationally expensive two-stage procedure. In this work, we apply recently-developed techniques from geometric Gaussian processes to combine interpolation and surface reconstruction into a single stage, requiring only one linear solve per sample. The resulting reconstructed surface samples can be queried locally in space, without the use of problem-dependent volumetric meshes or grids. These capabilities enable one to (a) perform probabilistic collision detection locally around the region of interest, (b) perform ray casting without evaluating points not on the ray's trajectory, and (c) perform next-view planning on a per-slice basis. They also improve reconstruction quality, by not requiring one to approximate kernel matrix inverses with diagonal matrices as part of intermediate computations. Results show that our approach provides a cleaner, more-principled, and more-flexible stochastic surface reconstruction pipeline.
Riemannian Residual Neural Networks
Oct 16, 2023



Recent methods in geometric deep learning have introduced various neural networks to operate over data that lie on Riemannian manifolds. Such networks are often necessary to learn well over graphs with a hierarchical structure or to learn over manifold-valued data encountered in the natural sciences. These networks are often inspired by and directly generalize standard Euclidean neural networks. However, extending Euclidean networks is difficult and has only been done for a select few manifolds. In this work, we examine the residual neural network (ResNet) and show how to extend this construction to general Riemannian manifolds in a geometrically principled manner. Originally introduced to help solve the vanishing gradient problem, ResNets have become ubiquitous in machine learning due to their beneficial learning properties, excellent empirical results, and easy-to-incorporate nature when building varied neural networks. We find that our Riemannian ResNets mirror these desirable properties: when compared to existing manifold neural networks designed to learn over hyperbolic space and the manifold of symmetric positive definite matrices, we outperform both kinds of networks in terms of relevant testing metrics and training dynamics.
Ray Conditioning: Trading Photo-consistency for Photo-realism in Multi-view Image Generation
Apr 26, 2023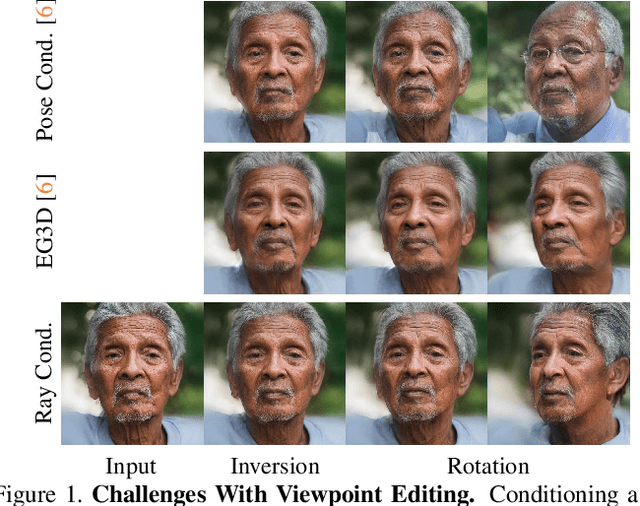



Multi-view image generation attracts particular attention these days due to its promising 3D-related applications, e.g., image viewpoint editing. Most existing methods follow a paradigm where a 3D representation is first synthesized, and then rendered into 2D images to ensure photo-consistency across viewpoints. However, such explicit bias for photo-consistency sacrifices photo-realism, causing geometry artifacts and loss of fine-scale details when these methods are applied to edit real images. To address this issue, we propose ray conditioning, a geometry-free alternative that relaxes the photo-consistency constraint. Our method generates multi-view images by conditioning a 2D GAN on a light field prior. With explicit viewpoint control, state-of-the-art photo-realism and identity consistency, our method is particularly suited for the viewpoint editing task.