 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Poisson Surface Reconstruction with One Solve using Geometric Gaussian Processes
Mar 24, 2025Poisson Surface Reconstruction is a widely-used algorithm for reconstructing a surface from an oriented point cloud. To facilitate applications where only partial surface information is available, or scanning is performed sequentially, a recent line of work proposes to incorporate uncertainty into the reconstructed surface via Gaussian process models. The resulting algorithms first perform Gaussian process interpolation, then solve a set of volumetric partial differential equations globally in space, resulting in a computationally expensive two-stage procedure. In this work, we apply recently-developed techniques from geometric Gaussian processes to combine interpolation and surface reconstruction into a single stage, requiring only one linear solve per sample. The resulting reconstructed surface samples can be queried locally in space, without the use of problem-dependent volumetric meshes or grids. These capabilities enable one to (a) perform probabilistic collision detection locally around the region of interest, (b) perform ray casting without evaluating points not on the ray's trajectory, and (c) perform next-view planning on a per-slice basis. They also improve reconstruction quality, by not requiring one to approximate kernel matrix inverses with diagonal matrices as part of intermediate computations. Results show that our approach provides a cleaner, more-principled, and more-flexible stochastic surface reconstruction pipeline.
Randomly Projected Additive Gaussian Processes for Regression
Dec 30, 2019


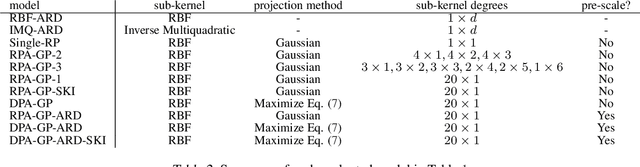
Gaussian processes (GPs) provide flexible distributions over functions, with inductive biases controlled by a kernel. However, in many applications Gaussian processes can struggle with even moderate input dimensionality. Learning a low dimensional projection can help alleviate this curse of dimensionality, but introduces many trainable hyperparameters, which can be cumbersome, especially in the small data regime. We use additive sums of kernels for GP regression, where each kernel operates on a different random projection of its inputs. Surprisingly, we find that as the number of random projections increases, the predictive performance of this approach quickly converges to the performance of a kernel operating on the original full dimensional inputs, over a wide range of data sets, even if we are projecting into a single dimension. As a consequence, many problems can remarkably be reduced to one dimensional input spaces, without learning a transformation. We prove this convergence and its rate, and additionally propose a deterministic approach that converges more quickly than purely random projections. Moreover, we demonstrate our approach can achieve faster inference and improved predictive accuracy for high-dimensional inputs compared to kernels in the original input space.