 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoDe: Communication Delay-Tolerant Multi-Agent Collaboration via Dual Alignment of Intent and Timeliness
Jan 09, 2025



Communication has been widely employed to enhance multi-agent collaboration. Previous research has typically assumed delay-free communication, a strong assumption that is challenging to meet in practice. However, real-world agents suffer from channel delays, receiving messages sent at different time points, termed {\it{Asynchronous Communication}}, leading to cognitive biases and breakdowns in collaboration. This paper first defines two communication delay settings in MARL and emphasizes their harm to collaboration. To handle the above delays, this paper proposes a novel framework, Communication Delay-tolerant Multi-Agent Collaboration (CoDe). At first, CoDe learns an intent representation as messages through future action inference, reflecting the stable future behavioral trends of the agents. Then, CoDe devises a dual alignment mechanism of intent and timeliness to strengthen the fusion process of asynchronous messages. In this way, agents can extract the long-term intent of others, even from delayed messages, and selectively utilize the most recent messages that are relevant to their intent. Experimental results demonstrate that CoDe outperforms baseline algorithms in three MARL benchmarks without delay and exhibits robustness under fixed and time-varying delays.
Look Beneath the Surface: Exploiting Fundamental Symmetry for Sample-Efficient Offline RL
Jun 08, 2023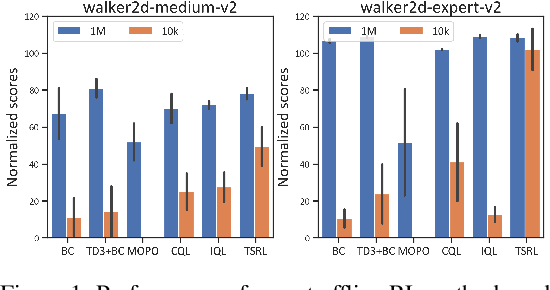
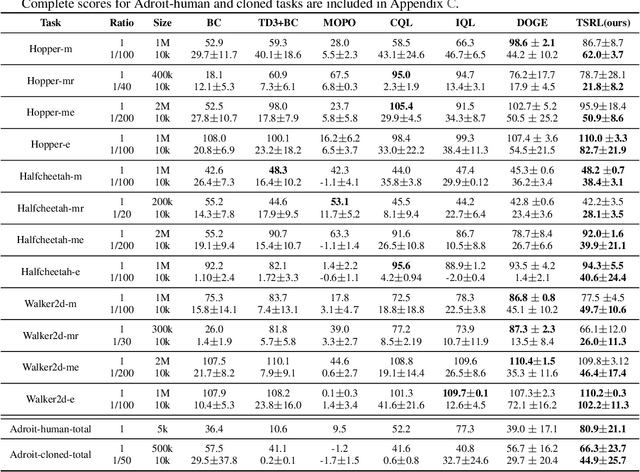


Offline reinforcement learning (RL) offers an appealing approach to real-world tasks by learning policies from pre-collected datasets without interacting with the environment. However, the performance of existing offline RL algorithms heavily depends on the scale and state-action space coverage of datasets. Real-world data collection is often expensive and uncontrollable, leading to small and narrowly covered datasets and posing significant challenges for practical deployments of offline RL. In this paper, we provide a new insight that leveraging the fundamental symmetry of system dynamics can substantially enhance offline RL performance under small datasets. Specifically, we propose a Time-reversal symmetry (T-symmetry) enforced Dynamics Model (TDM), which establishes consistency between a pair of forward and reverse latent dynamics. TDM provides both well-behaved representations for small datasets and a new reliability measure for OOD samples based on compliance with the T-symmetry. These can be readily used to construct a new offline RL algorithm (TSRL) with less conservative policy constraints and a reliable latent space data augmentation procedure. Based on extensive experiments, we find TSRL achieves great performance on small benchmark datasets with as few as 1% of the original samples, which significantly outperforms the recent offline RL algorithms in terms of data efficiency and generalizability.