 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Correspondence for Deformable Objects
May 14, 2024
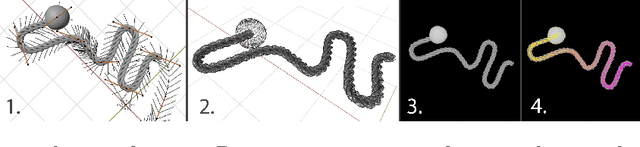
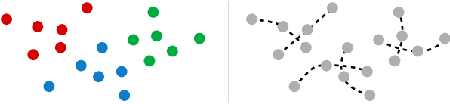
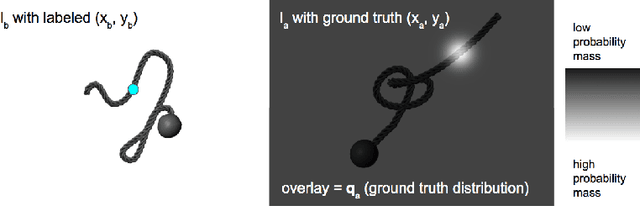
We investigate the problem of pixelwise correspondence for deformable objects, namely cloth and rope, by comparing both classical and learning-based methods. We choose cloth and rope because they are traditionally some of the most difficult deformable objects to analytically model with their large configuration space, and they are meaningful in the context of robotic tasks like cloth folding, rope knot-tying, T-shirt folding, curtain closing, etc. The correspondence problem is heavily motivated in robotics, with wide-ranging applications including semantic grasping, object tracking, and manipulation policies built on top of correspondences. We present an exhaustive survey of existing classical methods for doing correspondence via feature-matching, including SIFT, SURF, and ORB, and two recently published learning-based methods including TimeCycle and Dense Object Nets. We make three main contributions: (1) a framework for simulating and rendering synthetic images of deformable objects, with qualitative results demonstrating transfer between our simulated and real domains (2) a new learning-based correspondence method extending Dense Object Nets, and (3) a standardized comparison across state-of-the-art correspondence methods. Our proposed method provides a flexible, general formulation for learning temporally and spatially continuous correspondences for nonrigid (and rigid) objects. We report root mean squared error statistics for all methods and find that Dense Object Nets outperforms baseline classical methods for correspondence, and our proposed extension of Dense Object Nets performs similarly.
Kit-Net: Self-Supervised Learning to Kit Novel 3D Objects into Novel 3D Cavities
Jul 13, 2021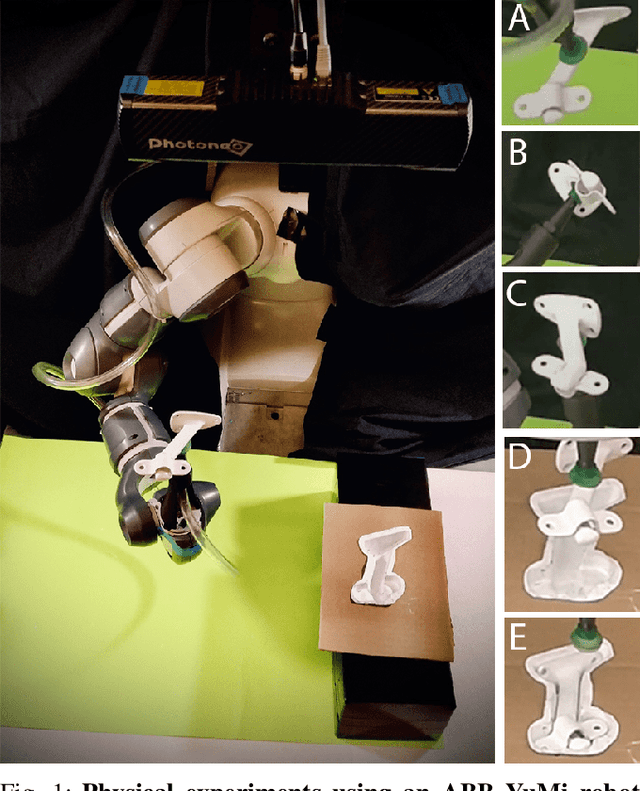

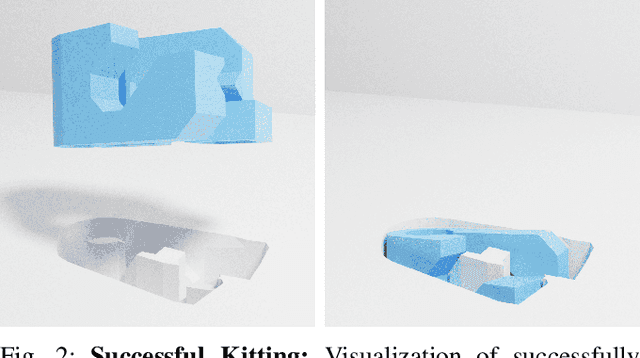
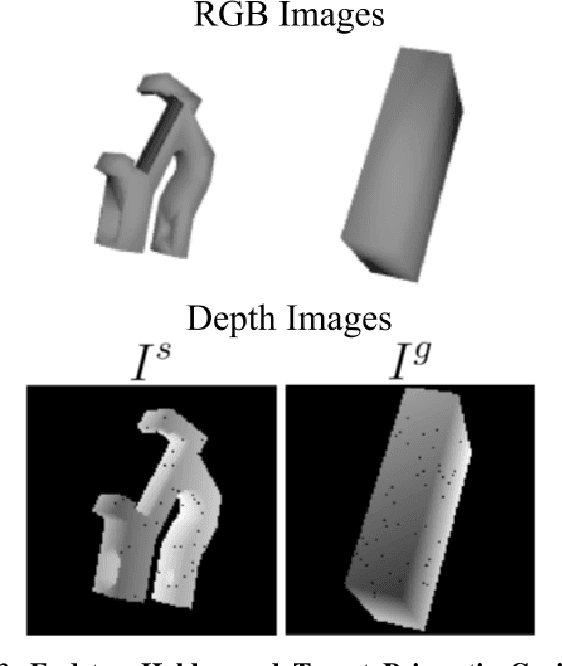
In industrial part kitting, 3D objects are inserted into cavities for transportation or subsequent assembly. Kitting is a critical step as it can decrease downstream processing and handling times and enable lower storage and shipping costs. We present Kit-Net, a framework for kitting previously unseen 3D objects into cavities given depth images of both the target cavity and an object held by a gripper in an unknown initial orientation. Kit-Net uses self-supervised deep learning and data augmentation to train a convolutional neural network (CNN) to robustly estimate 3D rotations between objects and matching concave or convex cavities using a large training dataset of simulated depth images pairs. Kit-Net then uses the trained CNN to implement a controller to orient and position novel objects for insertion into novel prismatic and conformal 3D cavities. Experiments in simulation suggest that Kit-Net can orient objects to have a 98.9% average intersection volume between the object mesh and that of the target cavity. Physical experiments with industrial objects succeed in 18% of trials using a baseline method and in 63% of trials with Kit-Net. Video, code, and data are available at https://github.com/BerkeleyAutomation/Kit-Net.
Orienting Novel 3D Objects Using Self-Supervised Learning of Rotation Transforms
May 29, 2021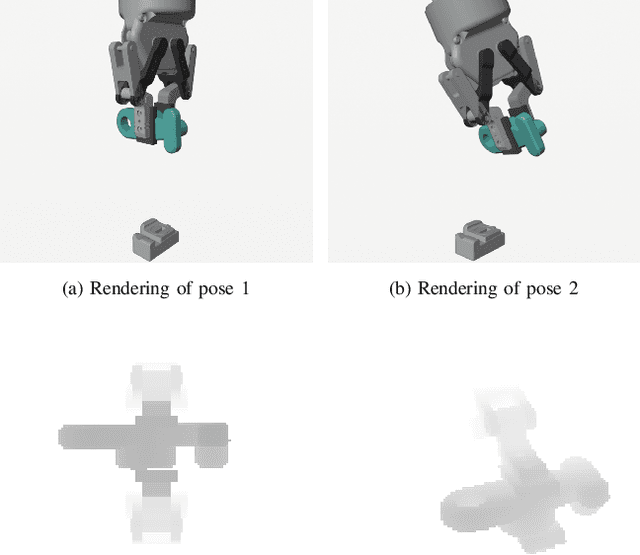
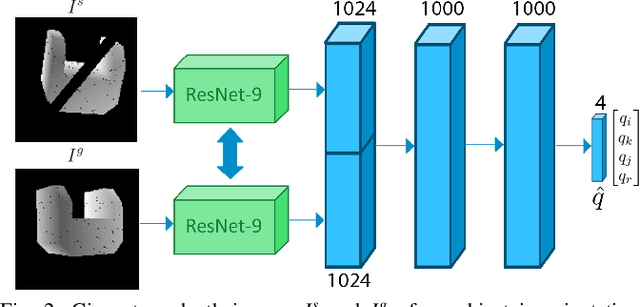
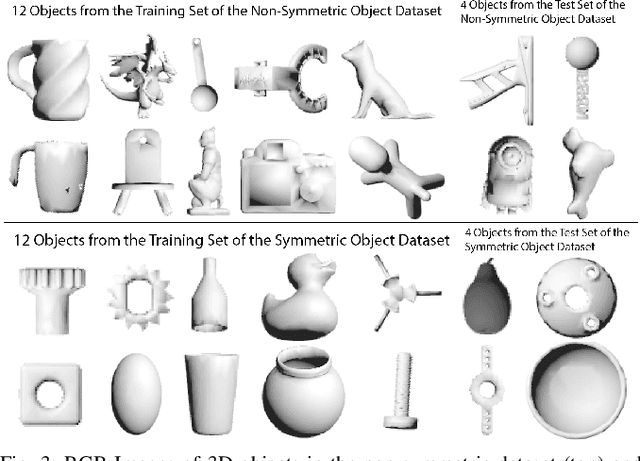
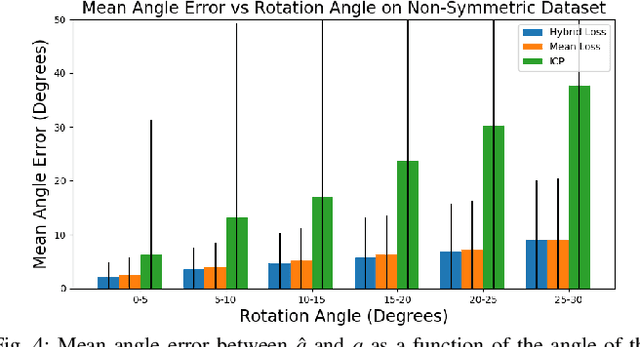
Orienting objects is a critical component in the automation of many packing and assembly tasks. We present an algorithm to orient novel objects given a depth image of the object in its current and desired orientation. We formulate a self-supervised objective for this problem and train a deep neural network to estimate the 3D rotation as parameterized by a quaternion, between these current and desired depth images. We then use the trained network in a proportional controller to re-orient objects based on the estimated rotation between the two depth images. Results suggest that in simulation we can rotate unseen objects with unknown geometries by up to 30{\deg} with a median angle error of 1.47{\deg} over 100 random initial/desired orientations each for 22 novel objects. Experiments on physical objects suggest that the controller can achieve a median angle error of 4.2{\deg} over 10 random initial/desired orientations each for 5 objects.
Exploratory Grasping: Asymptotically Optimal Algorithms for Grasping Challenging Polyhedral Objects
Nov 12, 2020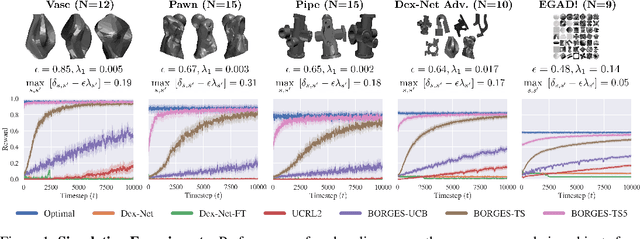
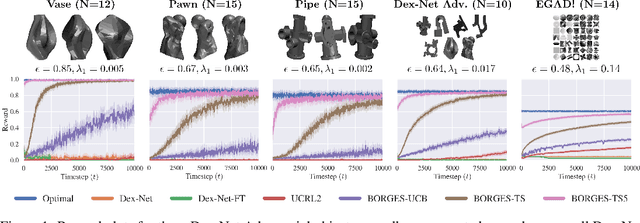
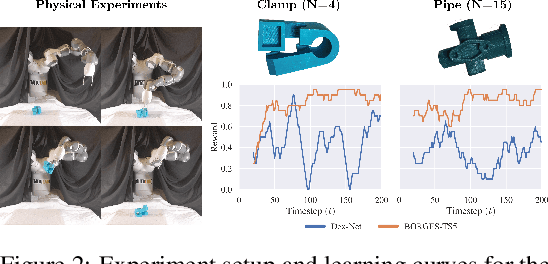

There has been significant recent work on data-driven algorithms for learning general-purpose grasping policies. However, these policies can consistently fail to grasp challenging objects which are significantly out of the distribution of objects in the training data or which have very few high quality grasps. Motivated by such objects, we propose a novel problem setting, Exploratory Grasping, for efficiently discovering reliable grasps on an unknown polyhedral object via sequential grasping, releasing, and toppling. We formalize Exploratory Grasping as a Markov Decision Process, study the theoretical complexity of Exploratory Grasping in the context of reinforcement learning and present an efficient bandit-style algorithm, Bandits for Online Rapid Grasp Exploration Strategy (BORGES), which leverages the structure of the problem to efficiently discover high performing grasps for each object stable pose. BORGES can be used to complement any general-purpose grasping algorithm with any grasp modality (parallel-jaw, suction, multi-fingered, etc) to learn policies for objects in which they exhibit persistent failures. Simulation experiments suggest that BORGES can significantly outperform both general-purpose grasping pipelines and two other online learning algorithms and achieves performance within 5% of the optimal policy within 1000 and 8000 timesteps on average across 46 challenging objects from the Dex-Net adversarial and EGAD! object datasets, respectively. Initial physical experiments suggest that BORGES can improve grasp success rate by 45% over a Dex-Net baseline with just 200 grasp attempts in the real world. See https://tinyurl.com/exp-grasping for supplementary material and videos.