 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeST-$π$: Structured SpatioTemporal VLA for Robotic Manipulation
Apr 20, 2026Vision-language-action (VLA) models have achieved great success on general robotic tasks, but still face challenges in fine-grained spatiotemporal manipulation. Typically, existing methods mainly embed spatiotemporal knowledge into visual and action representations, and directly perform a cross-modal mapping for step-level action prediction. However, such spatiotemporal reasoning remains largely implicit, making it difficult to handle multiple sequential behaviors with explicit spatiotemporal boundaries. In this work, we propose ST-$π$, a structured spatiotemporal VLA model for robotic manipulation. Our model is guided by two key designs: 1) Spatiotemporal VLM. We encode 4D observations and task instructions into latent spaces, and feed them into the LLM to generate a sequence of causally ordered chunk-level action prompts consisting of sub-tasks, spatial grounding and temporal grounding. 2) Spatiotemporal action expert. Conditioned on chunk-level action prompts, we design a structured dual-generator guidance to jointly model spatial dependencies and temporal causality, thus predicting step-level action parameters. Within this structured framework, the VLM explicitly plans global spatiotemporal behavior, and the action expert further refines local spatiotemporal control. In addition, we propose a real-world robotic dataset with structured spatiotemporal annotations for fine-tuning. Extensive experiments have been conducted to demonstrate the effectiveness of our model. Our code link: https://github.com/chuanhaoma/ST-pi.
Adapting Depth Anything to Adverse Imaging Conditions with Events
Jan 05, 2026Robust depth estimation under dynamic and adverse lighting conditions is essential for robotic systems. Currently, depth foundation models, such as Depth Anything, achieve great success in ideal scenes but remain challenging under adverse imaging conditions such as extreme illumination and motion blur. These degradations corrupt the visual signals of frame cameras, weakening the discriminative features of frame-based depths across the spatial and temporal dimensions. Typically, existing approaches incorporate event cameras to leverage their high dynamic range and temporal resolution, aiming to compensate for corrupted frame features. However, such specialized fusion models are predominantly trained from scratch on domain-specific datasets, thereby failing to inherit the open-world knowledge and robust generalization inherent to foundation models. In this work, we propose ADAE, an event-guided spatiotemporal fusion framework for Depth Anything in degraded scenes. Our design is guided by two key insights: 1) Entropy-Aware Spatial Fusion. We adaptively merge frame-based and event-based features using an information entropy strategy to indicate illumination-induced degradation. 2) Motion-Guided Temporal Correction. We resort to the event-based motion cue to recalibrate ambiguous features in blurred regions. Under our unified framework, the two components are complementary to each other and jointly enhance Depth Anything under adverse imaging conditions. Extensive experiments have been performed to verify the superiority of the proposed method. Our code will be released upon acceptance.
CoSEC: A Coaxial Stereo Event Camera Dataset for Autonomous Driving
Aug 16, 2024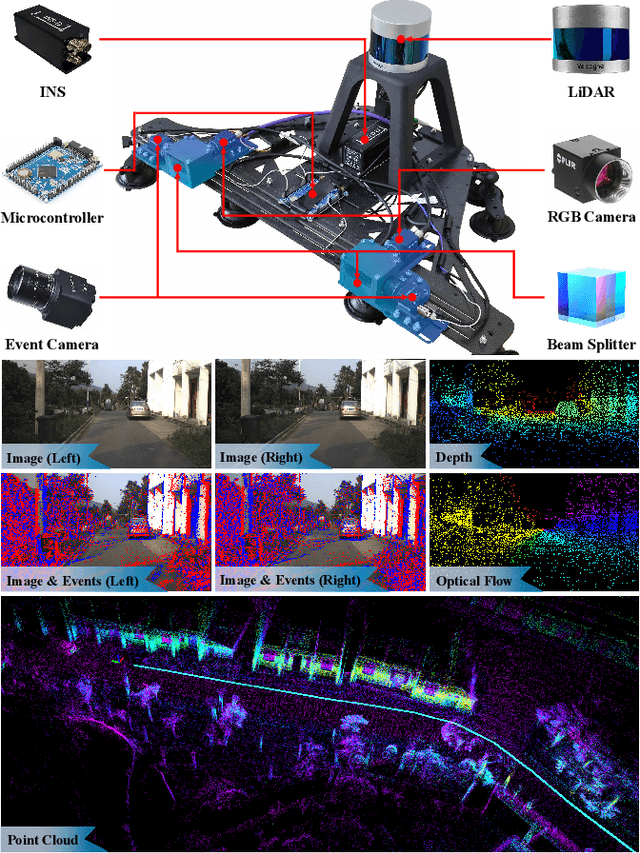
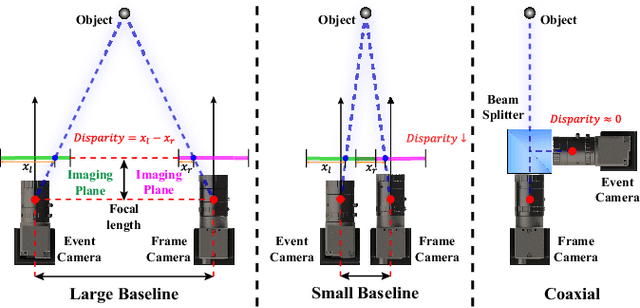
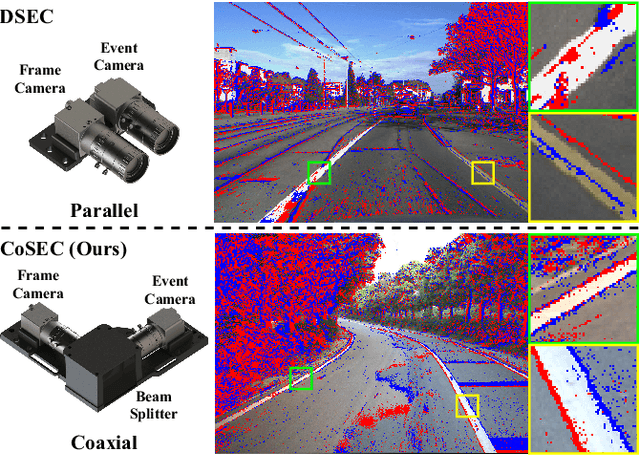
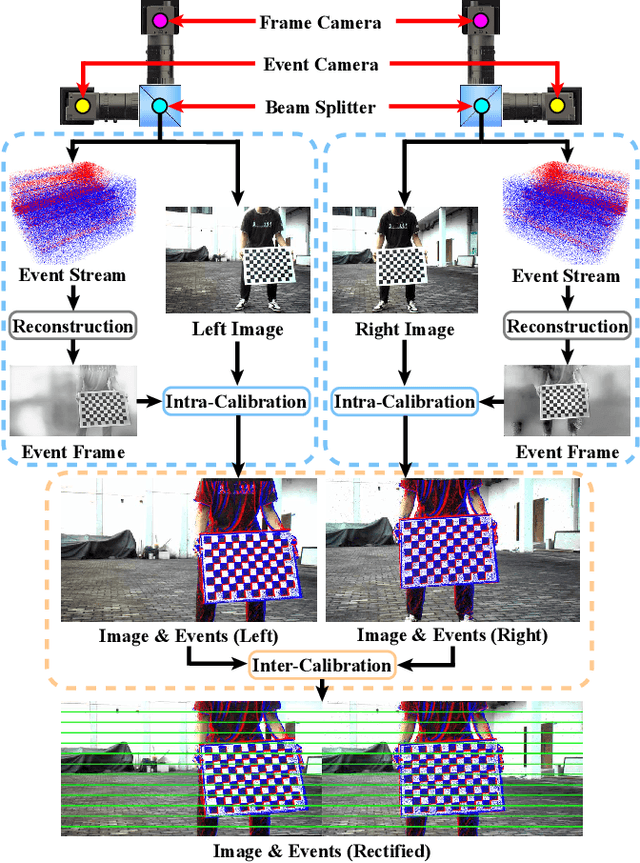
Conventional frame camera is the mainstream sensor of the autonomous driving scene perception, while it is limited in adverse conditions, such as low light. Event camera with high dynamic range has been applied in assisting frame camera for the multimodal fusion, which relies heavily on the pixel-level spatial alignment between various modalities. Typically, existing multimodal datasets mainly place event and frame cameras in parallel and directly align them spatially via warping operation. However, this parallel strategy is less effective for multimodal fusion, since the large disparity exacerbates spatial misalignment due to the large event-frame baseline. We argue that baseline minimization can reduce alignment error between event and frame cameras. In this work, we introduce hybrid coaxial event-frame devices to build the multimodal system, and propose a coaxial stereo event camera (CoSEC) dataset for autonomous driving. As for the multimodal system, we first utilize the microcontroller to achieve time synchronization, and then spatially calibrate different sensors, where we perform intra- and inter-calibration of stereo coaxial devices. As for the multimodal dataset, we filter LiDAR point clouds to generate depth and optical flow labels using reference depth, which is further improved by fusing aligned event and frame data in nighttime conditions. With the help of the coaxial device, the proposed dataset can promote the all-day pixel-level multimodal fusion. Moreover, we also conduct experiments to demonstrate that the proposed dataset can improve the performance and generalization of the multimodal fusion.
LED: A Large-scale Real-world Paired Dataset for Event Camera Denoising
May 30, 2024



Event camera has significant advantages in capturing dynamic scene information while being prone to noise interference, particularly in challenging conditions like low threshold and low illumination. However, most existing research focuses on gentle situations, hindering event camera applications in realistic complex scenarios. To tackle this limitation and advance the field, we construct a new paired real-world event denoising dataset (LED), including 3K sequences with 18K seconds of high-resolution (1200*680) event streams and showing three notable distinctions compared to others: diverse noise levels and scenes, larger-scale with high-resolution, and high-quality GT. Specifically, it contains stepped parameters and varying illumination with diverse scenarios. Moreover, based on the property of noise events inconsistency and signal events consistency, we propose a novel effective denoising framework(DED) using homogeneous dual events to generate the GT with better separating noise from the raw. Furthermore, we design a bio-inspired baseline leveraging Leaky-Integrate-and-Fire (LIF) neurons with dynamic thresholds to realize accurate denoising. The experimental results demonstrate that the remarkable performance of the proposed approach on different datasets.The dataset and code are at https://github.com/Yee-Sing/led.
Seeing Motion at Nighttime with an Event Camera
Apr 18, 2024



We focus on a very challenging task: imaging at nighttime dynamic scenes. Most previous methods rely on the low-light enhancement of a conventional RGB camera. However, they would inevitably face a dilemma between the long exposure time of nighttime and the motion blur of dynamic scenes. Event cameras react to dynamic changes with higher temporal resolution (microsecond) and higher dynamic range (120dB), offering an alternative solution. In this work, we present a novel nighttime dynamic imaging method with an event camera. Specifically, we discover that the event at nighttime exhibits temporal trailing characteristics and spatial non-stationary distribution. Consequently, we propose a nighttime event reconstruction network (NER-Net) which mainly includes a learnable event timestamps calibration module (LETC) to align the temporal trailing events and a non-uniform illumination aware module (NIAM) to stabilize the spatiotemporal distribution of events. Moreover, we construct a paired real low-light event dataset (RLED) through a co-axial imaging system, including 64,200 spatially and temporally aligned image GTs and low-light events. Extensive experiments demonstrate that the proposed method outperforms state-of-the-art methods in terms of visual quality and generalization ability on real-world nighttime datasets. The project are available at: https://github.com/Liu-haoyue/NER-Net.
JSTR: Joint Spatio-Temporal Reasoning for Event-based Moving Object Detection
Mar 12, 2024



Event-based moving object detection is a challenging task, where static background and moving object are mixed together. Typically, existing methods mainly align the background events to the same spatial coordinate system via motion compensation to distinguish the moving object. However, they neglect the potential spatial tailing effect of moving object events caused by excessive motion, which may affect the structure integrity of the extracted moving object. We discover that the moving object has a complete columnar structure in the point cloud composed of motion-compensated events along the timestamp. Motivated by this, we propose a novel joint spatio-temporal reasoning method for event-based moving object detection. Specifically, we first compensate the motion of background events using inertial measurement unit. In spatial reasoning stage, we project the compensated events into the same image coordinate, discretize the timestamp of events to obtain a time image that can reflect the motion confidence, and further segment the moving object through adaptive threshold on the time image. In temporal reasoning stage, we construct the events into a point cloud along timestamp, and use RANSAC algorithm to extract the columnar shape in the cloud for peeling off the background. Finally, we fuse the results from the two reasoning stages to extract the final moving object region. This joint spatio-temporal reasoning framework can effectively detect the moving object from motion confidence and geometric structure. Moreover, we conduct extensive experiments on various datasets to verify that the proposed method can improve the moving object detection accuracy by 13\%.