 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAesthetic Camera Viewpoint Suggestion with 3D Aesthetic Field
Feb 23, 2026The aesthetic quality of a scene depends strongly on camera viewpoint. Existing approaches for aesthetic viewpoint suggestion are either single-view adjustments, predicting limited camera adjustments from a single image without understanding scene geometry, or 3D exploration approaches, which rely on dense captures or prebuilt 3D environments coupled with costly reinforcement learning (RL) searches. In this work, we introduce the notion of 3D aesthetic field that enables geometry-grounded aesthetic reasoning in 3D with sparse captures, allowing efficient viewpoint suggestions in contrast to costly RL searches. We opt to learn this 3D aesthetic field using a feedforward 3D Gaussian Splatting network that distills high-level aesthetic knowledge from a pretrained 2D aesthetic model into 3D space, enabling aesthetic prediction for novel viewpoints from only sparse input views. Building on this field, we propose a two-stage search pipeline that combines coarse viewpoint sampling with gradient-based refinement, efficiently identifying aesthetically appealing viewpoints without dense captures or RL exploration. Extensive experiments show that our method consistently suggests viewpoints with superior framing and composition compared to existing approaches, establishing a new direction toward 3D-aware aesthetic modeling.
HybridMQA: Exploring Geometry-Texture Interactions for Colored Mesh Quality Assessment
Dec 02, 2024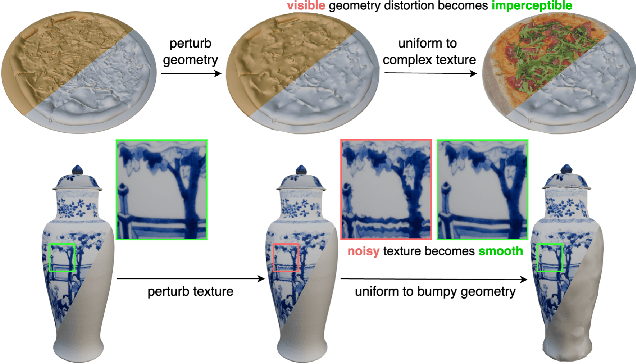
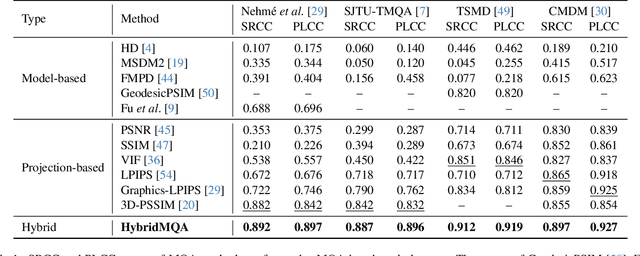
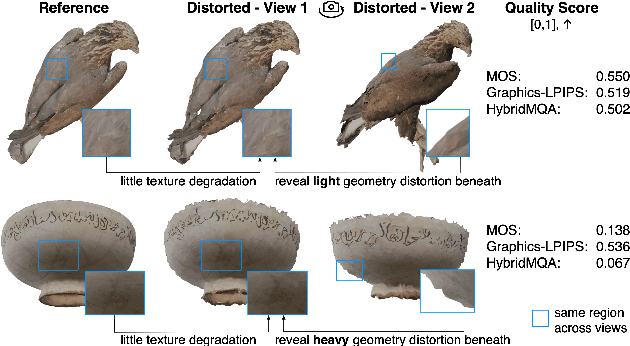
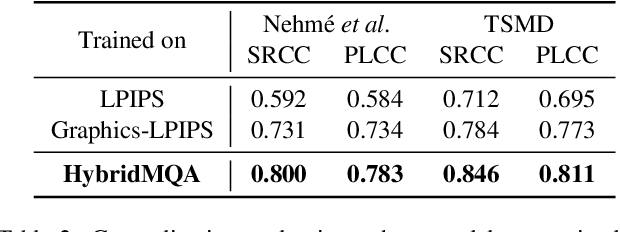
Mesh quality assessment (MQA) models play a critical role in the design, optimization, and evaluation of mesh operation systems in a wide variety of applications. Current MQA models, whether model-based methods using topology-aware features or projection-based approaches working on rendered 2D projections, often fail to capture the intricate interactions between texture and 3D geometry. We introduce HybridMQA, a first-of-its-kind hybrid full-reference colored MQA framework that integrates model-based and projection-based approaches, capturing complex interactions between textural information and 3D structures for enriched quality representations. Our method employs graph learning to extract detailed 3D representations, which are then projected to 2D using a novel feature rendering process that precisely aligns them with colored projections. This enables the exploration of geometry-texture interactions via cross-attention, producing comprehensive mesh quality representations. Extensive experiments demonstrate HybridMQA's superior performance across diverse datasets, highlighting its ability to effectively leverage geometry-texture interactions for a thorough understanding of mesh quality. Our implementation will be made publicly available.
Probeable DARTS with Application to Computational Pathology
Aug 16, 2021



AI technology has made remarkable achievements in computational pathology (CPath), especially with the help of deep neural networks. However, the network performance is highly related to architecture design, which commonly requires human experts with domain knowledge. In this paper, we combat this challenge with the recent advance in neural architecture search (NAS) to find an optimal network for CPath applications. In particular, we use differentiable architecture search (DARTS) for its efficiency. We first adopt a probing metric to show that the original DARTS lacks proper hyperparameter tuning on the CIFAR dataset, and how the generalization issue can be addressed using an adaptive optimization strategy. We then apply our searching framework on CPath applications by searching for the optimum network architecture on a histological tissue type dataset (ADP). Results show that the searched network outperforms state-of-the-art networks in terms of prediction accuracy and computation complexity. We further conduct extensive experiments to demonstrate the transferability of the searched network to new CPath applications, the robustness against downscaled inputs, as well as the reliability of predictions.
Robot-assisted Backscatter Localization for IoT Applications
May 21, 2020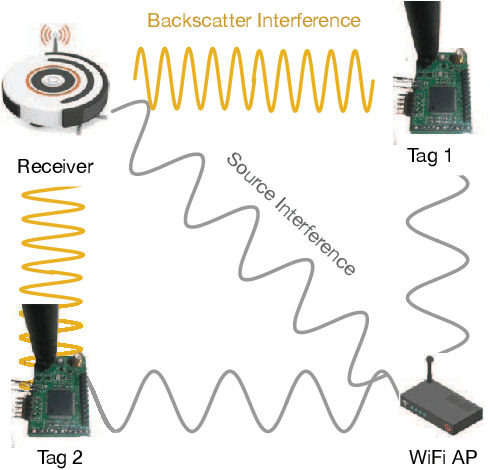
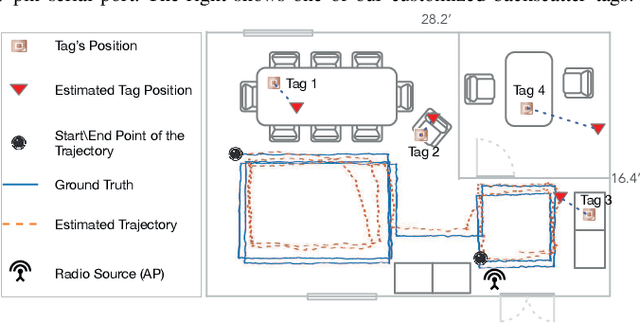
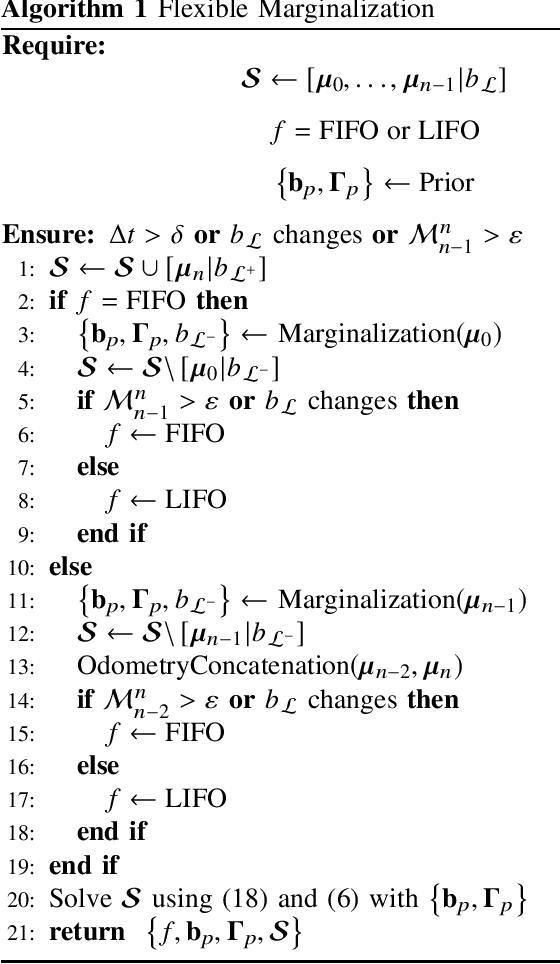
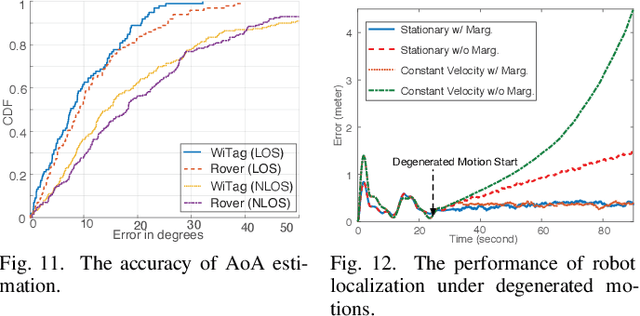
Recent years have witnessed the rapid proliferation of backscatter technologies that realize the ubiquitous and long-term connectivity to empower smart cities and smart homes. Localizing such backscatter tags is crucial for IoT-based smart applications. However, current backscatter localization systems require prior knowledge of the site, either a map or landmarks with known positions, which is laborious for deployment. To empower universal localization service, this paper presents Rover, an indoor localization system that localizes multiple backscatter tags without any start-up cost using a robot equipped with inertial sensors. Rover runs in a joint optimization framework, fusing measurements from backscattered WiFi signals and inertial sensors to simultaneously estimate the locations of both the robot and the connected tags. Our design addresses practical issues including interference among multiple tags, real-time processing, as well as the data marginalization problem in dealing with degenerated motions. We prototype Rover using off-the-shelf WiFi chips and customized backscatter tags. Our experiments show that Rover achieves localization accuracies of 39.3 cm for the robot and 74.6 cm for the tags.
Localizing Backscatters by a Single Robot With Zero Start-up Cost
Aug 09, 2019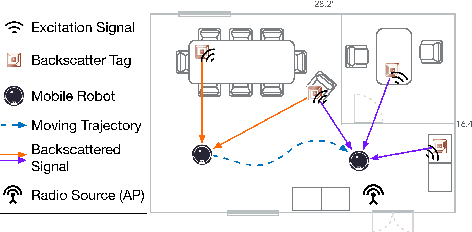

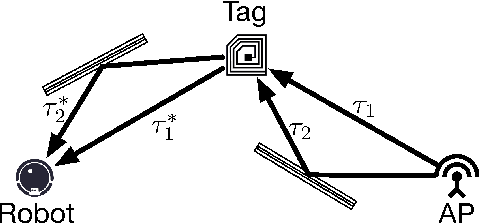
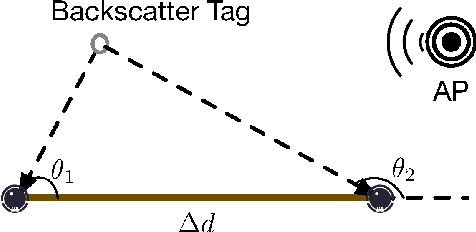
Recent years have witnessed the rapid proliferation of low-power backscatter technologies that realize the ubiquitous and long-term connectivity to empower smart cities and smart homes. Localizing such low-power backscatter tags is crucial for IoT-based smart services. However, current backscatter localization systems require prior knowledge of the site, either a map or landmarks with known positions, increasing the deployment cost. To empower universal localization service, this paper presents Rover, an indoor localization system that simultaneously localizes multiple backscatter tags with zero start-up cost using a robot equipped with inertial sensors. Rover runs in a joint optimization framework, fusing WiFi-based positioning measurements with inertial measurements to simultaneously estimate the locations of both the robot and the connected tags. Our design addresses practical issues such as the interference among multiple tags and the real-time processing for solving the SLAM problem. We prototype Rover using off-the-shelf WiFi chips and customized backscatter tags. Our experiments show that Rover achieves localization accuracies of 39.3 cm for the robot and 74.6 cm for the tags.