 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiently Training On-Policy Actor-Critic Networks in Robotic Deep Reinforcement Learning with Demonstration-like Sampled Exploration
Sep 27, 2021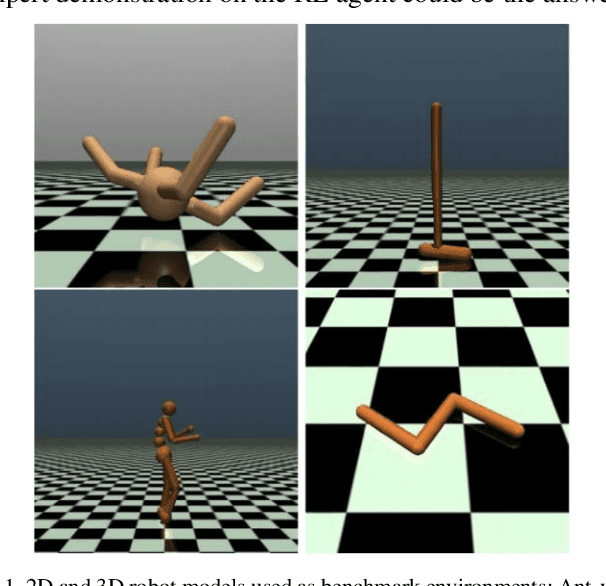
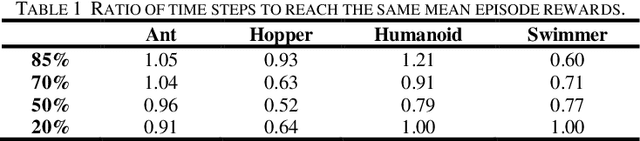
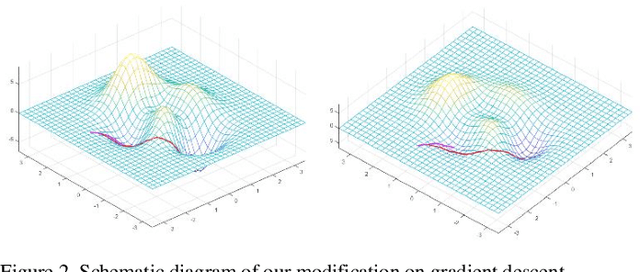
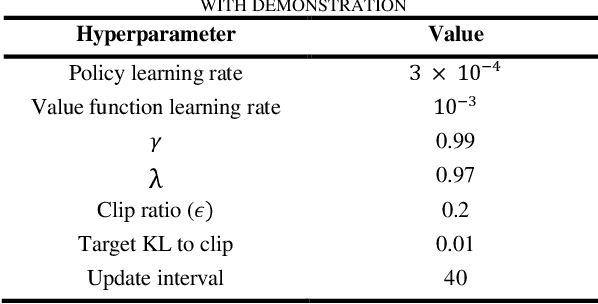
In complex environments with high dimension, training a reinforcement learning (RL) model from scratch often suffers from lengthy and tedious collection of agent-environment interactions. Instead, leveraging expert demonstration to guide RL agent can boost sample efficiency and improve final convergence. In order to better integrate expert prior with on-policy RL models, we propose a generic framework for Learning from Demonstration (LfD) based on actor-critic algorithms. Technically, we first employ K-Means clustering to evaluate the similarity of sampled exploration with demonstration data. Then we increase the likelihood of actions in similar frames by modifying the gradient update strategy to leverage demonstration. We conduct experiments on 4 standard benchmark environments in Mujoco and 2 self-designed robotic environments. Results show that, under certain condition, our algorithm can improve sample efficiency by 20% ~ 40%. By combining our framework with on-policy algorithms, RL models can accelerate convergence and obtain better final mean episode rewards especially in complex robotic context where interactions are expensive.
Efficient State Representation Learning for Dynamic Robotic Scenarios
Sep 17, 2021
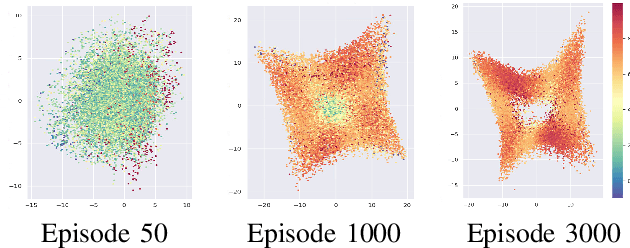
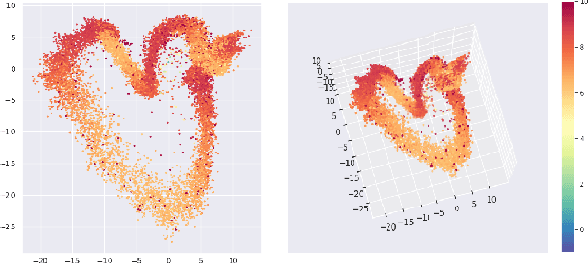
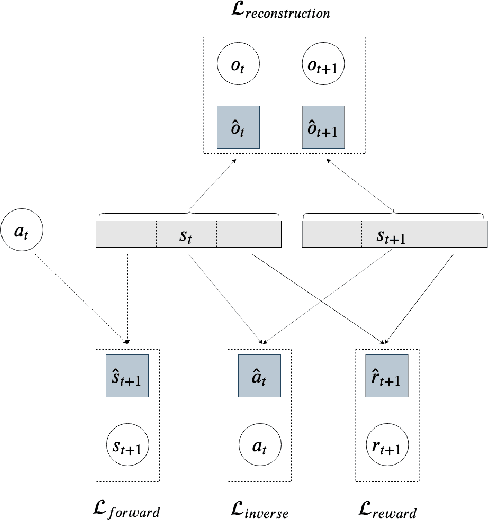
While the rapid progress of deep learning fuels end-to-end reinforcement learning (RL), direct application, especially in high-dimensional space like robotic scenarios still suffers from high sample efficiency. Therefore State Representation Learning (SRL) is proposed to specifically learn to encode task-relevant features from complex sensory data into low-dimensional states. However, the pervasive implementation of SRL is usually conducted by a decoupling strategy in which the observation-state mapping is learned separately, which is prone to over-fit. To handle such problem, we present a new algorithm called Policy Optimization via Abstract Representation which integrates SRL into the original RL scale. Firstly, We engage RL loss to assist in updating SRL model so that the states can evolve to meet the demand of reinforcement learning and maintain a good physical interpretation. Secondly, we introduce a dynamic parameter adjustment mechanism so that both models can efficiently adapt to each other. Thirdly, we introduce a new prior called domain resemblance to leverage expert demonstration to train the SRL model. Finally, we provide a real-time access by state graph to monitor the course of learning. Results show that our algorithm outperforms the PPO baselines and decoupling strategies in terms of sample efficiency and final rewards. Thus our model can efficiently deal with tasks in high dimensions and facilitate training real-life robots directly from scratch.