 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBabyVLM-V2: Toward Developmentally Grounded Pretraining and Benchmarking of Vision Foundation Models
Dec 11, 2025Early children's developmental trajectories set up a natural goal for sample-efficient pretraining of vision foundation models. We introduce BabyVLM-V2, a developmentally grounded framework for infant-inspired vision-language modeling that extensively improves upon BabyVLM-V1 through a longitudinal, multifaceted pretraining set, a versatile model, and, most importantly, DevCV Toolbox for cognitive evaluation. The pretraining set maximizes coverage while minimizing curation of a longitudinal, infant-centric audiovisual corpus, yielding video-utterance, image-utterance, and multi-turn conversational data that mirror infant experiences. DevCV Toolbox adapts all vision-related measures of the recently released NIH Baby Toolbox into a benchmark suite of ten multimodal tasks, covering spatial reasoning, memory, and vocabulary understanding aligned with early children's capabilities. Experimental results show that a compact model pretrained from scratch can achieve competitive performance on DevCV Toolbox, outperforming GPT-4o on some tasks. We hope the principled, unified BabyVLM-V2 framework will accelerate research in developmentally plausible pretraining of vision foundation models.
BabyVLM: Data-Efficient Pretraining of VLMs Inspired by Infant Learning
Apr 13, 2025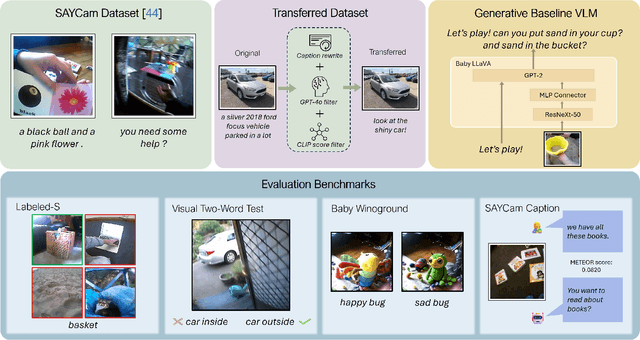

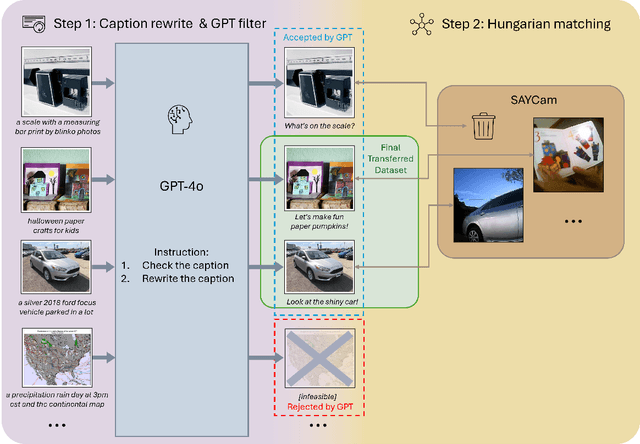

Human infants rapidly develop visual reasoning skills from minimal input, suggesting that developmentally inspired pretraining could significantly enhance the efficiency of vision-language models (VLMs). Although recent efforts have leveraged infant-inspired datasets like SAYCam, existing evaluation benchmarks remain misaligned--they are either too simplistic, narrowly scoped, or tailored for large-scale pretrained models. Additionally, training exclusively on infant data overlooks the broader, diverse input from which infants naturally learn. To address these limitations, we propose BabyVLM, a novel framework comprising comprehensive in-domain evaluation benchmarks and a synthetic training dataset created via child-directed transformations of existing datasets. We demonstrate that VLMs trained with our synthetic dataset achieve superior performance on BabyVLM tasks compared to models trained solely on SAYCam or general-purpose data of the SAYCam size. BabyVLM thus provides a robust, developmentally aligned evaluation tool and illustrates how compact models trained on carefully curated data can generalize effectively, opening pathways toward data-efficient vision-language learning paradigms.
An Intelligent Self-driving Truck System For Highway Transportation
Dec 31, 2021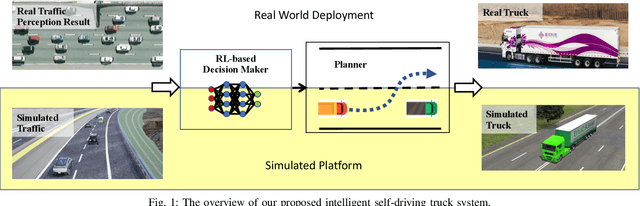
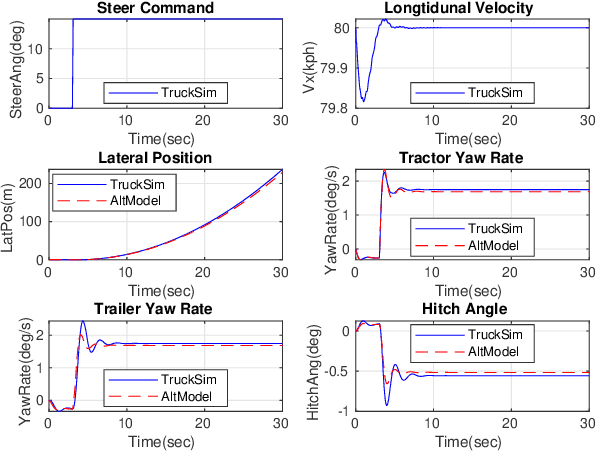
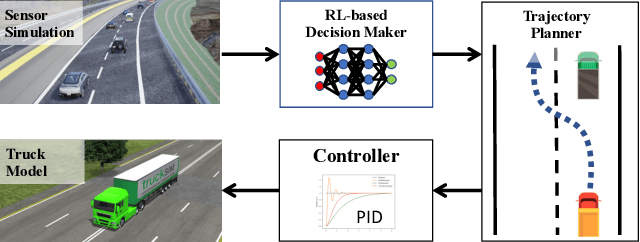
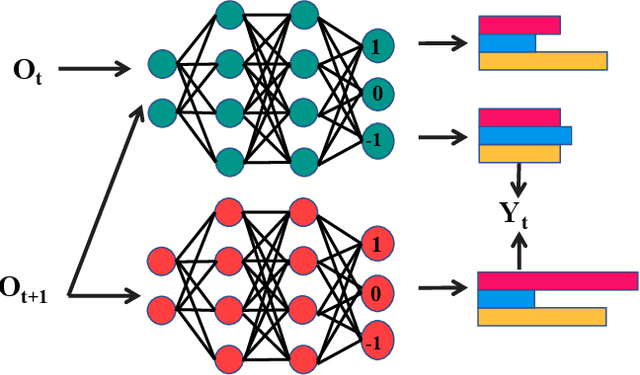
Recently, there have been many advances in autonomous driving society, attracting a lot of attention from academia and industry. However, existing works mainly focus on cars, extra development is still required for self-driving truck algorithms and models. In this paper, we introduce an intelligent self-driving truck system. Our presented system consists of three main components, 1) a realistic traffic simulation module for generating realistic traffic flow in testing scenarios, 2) a high-fidelity truck model which is designed and evaluated for mimicking real truck response in real-world deployment, 3) an intelligent planning module with learning-based decision making algorithm and multi-mode trajectory planner, taking into account the truck's constraints, road slope changes, and the surrounding traffic flow. We provide quantitative evaluations for each component individually to demonstrate the fidelity and performance of each part. We also deploy our proposed system on a real truck and conduct real world experiments which shows our system's capacity of mitigating sim-to-real gap. Our code is available at https://github.com/InceptioResearch/IITS