 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Robustness of Spiking Neural Networks in Federated Learning with Compression Against Non-omniscient Byzantine Attacks
Jan 06, 2025



Spiking Neural Networks (SNNs), which offer exceptional energy efficiency for inference, and Federated Learning (FL), which offers privacy-preserving distributed training, is a rising area of interest that highly beneficial towards Internet of Things (IoT) devices. Despite this, research that tackles Byzantine attacks and bandwidth limitation in FL-SNNs, both poses significant threats on model convergence and training times, still remains largely unexplored. Going beyond proposing a solution for both of these problems, in this work we highlight the dual benefits of FL-SNNs, against non-omniscient Byzantine adversaries (ones that restrict attackers access to local clients datasets), and greater communication efficiency, over FL-ANNs. Specifically, we discovered that a simple integration of Top-\k{appa} sparsification into the FL apparatus can help leverage the advantages of the SNN models in both greatly reducing bandwidth usage and significantly boosting the robustness of FL training against non-omniscient Byzantine adversaries. Most notably, we saw a massive improvement of roughly 40% accuracy gain in FL-SNNs training under the lethal MinMax attack
Security Risks Concerns of Generative AI in the IoT
Mar 29, 2024In an era where the Internet of Things (IoT) intersects increasingly with generative Artificial Intelligence (AI), this article scrutinizes the emergent security risks inherent in this integration. We explore how generative AI drives innovation in IoT and we analyze the potential for data breaches when using generative AI and the misuse of generative AI technologies in IoT ecosystems. These risks not only threaten the privacy and efficiency of IoT systems but also pose broader implications for trust and safety in AI-driven environments. The discussion in this article extends to strategic approaches for mitigating these risks, including the development of robust security protocols, the multi-layered security approaches, and the adoption of AI technological solutions. Through a comprehensive analysis, this article aims to shed light on the critical balance between embracing AI advancements and ensuring stringent security in IoT, providing insights into the future direction of these intertwined technologies.
CodeDSI: Differentiable Code Search
Oct 01, 2022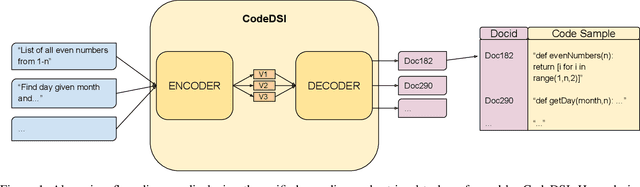
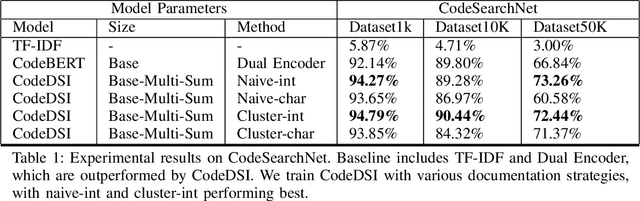
Reimplementing solutions to previously solved software engineering problems is not only inefficient but also introduces inadequate and error-prone code. Many existing methods achieve impressive performance on this issue by using autoregressive text-generation models trained on code. However, these methods are not without their flaws. The generated code from these models can be buggy, lack documentation, and introduce vulnerabilities that may go unnoticed by developers. An alternative to code generation -- neural code search -- is a field of machine learning where a model takes natural language queries as input and, in turn, relevant code samples from a database are returned. Due to the nature of this pre-existing database, code samples can be documented, tested, licensed, and checked for vulnerabilities before being used by developers in production. In this work, we present CodeDSI, an end-to-end unified approach to code search. CodeDSI is trained to directly map natural language queries to their respective code samples, which can be retrieved later. In an effort to improve the performance of code search, we have investigated docid representation strategies, impact of tokenization on docid structure, and dataset sizes on overall code search performance. Our results demonstrate CodeDSI strong performance, exceeding conventional robust baselines by 2-6% across varying dataset sizes.
Security Vulnerability Detection Using Deep Learning Natural Language Processing
May 06, 2021
Detecting security vulnerabilities in software before they are exploited has been a challenging problem for decades. Traditional code analysis methods have been proposed, but are often ineffective and inefficient. In this work, we model software vulnerability detection as a natural language processing (NLP) problem with source code treated as texts, and address the automated software venerability detection with recent advanced deep learning NLP models assisted by transfer learning on written English. For training and testing, we have preprocessed the NIST NVD/SARD databases and built a dataset of over 100,000 files in $C$ programming language with 123 types of vulnerabilities. The extensive experiments generate the best performance of over 93\% accuracy in detecting security vulnerabilities.
Automated Primary Hyperparathyroidism Screening with Neural Networks
May 06, 2021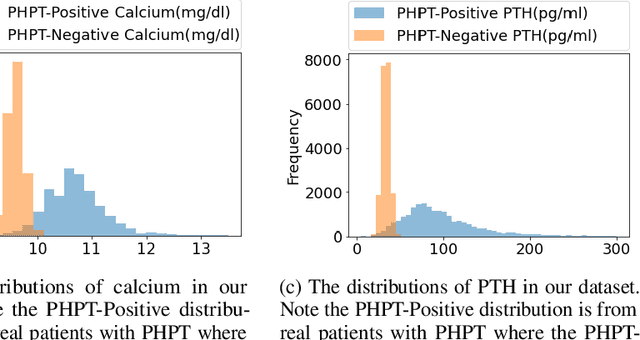
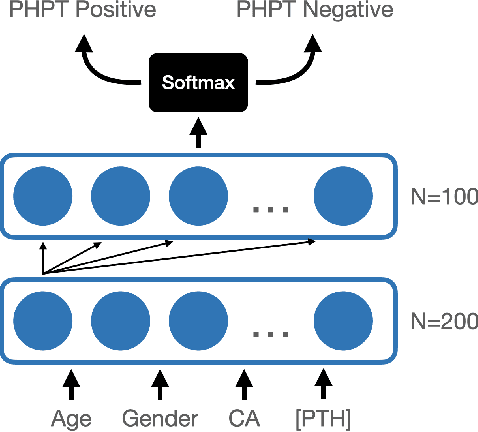
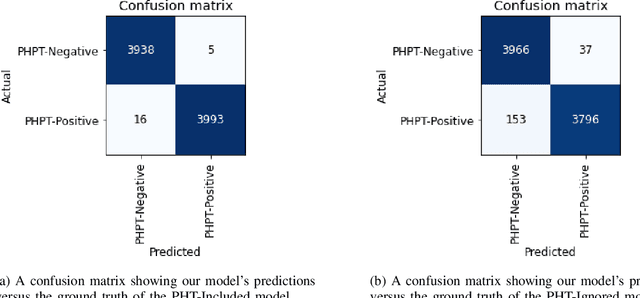
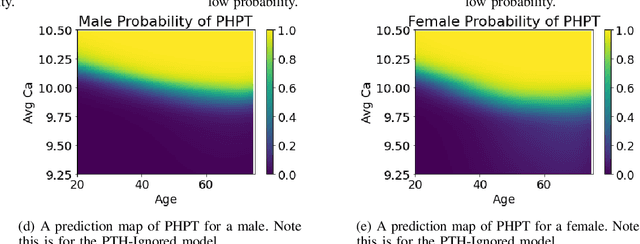
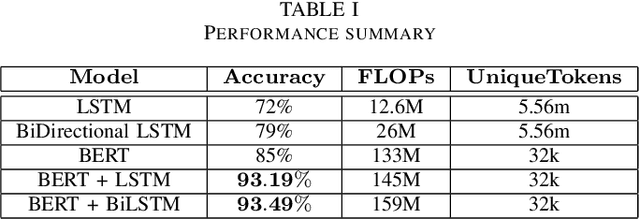
Primary Hyperparathyroidism(PHPT) is a relatively common disease, affecting about one in every 1,000 adults. However, screening for PHPT can be difficult, meaning it often goes undiagnosed for long periods of time. While looking at specific blood test results independently can help indicate whether a patient has PHPT, often these blood result levels can all be within their respective normal ranges despite the patient having PHPT. Based on the clinic data from the real world, in this work, we propose a novel approach to screening PHPT with neural network (NN) architecture, achieving over 97\% accuracy with common blood values as inputs. Further, we propose a second model achieving over 99\% accuracy with additional lab test values as inputs. Moreover, compared to traditional PHPT screening methods, our NN models can reduce the false negatives of traditional screening methods by 99\%.
Real Time 3D Indoor Human Image Capturing Based on FMCW Radar
Dec 08, 2018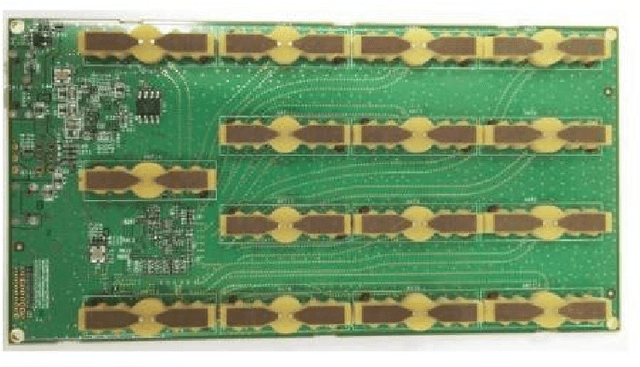

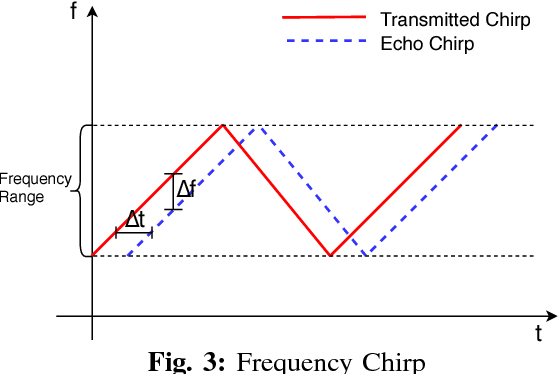
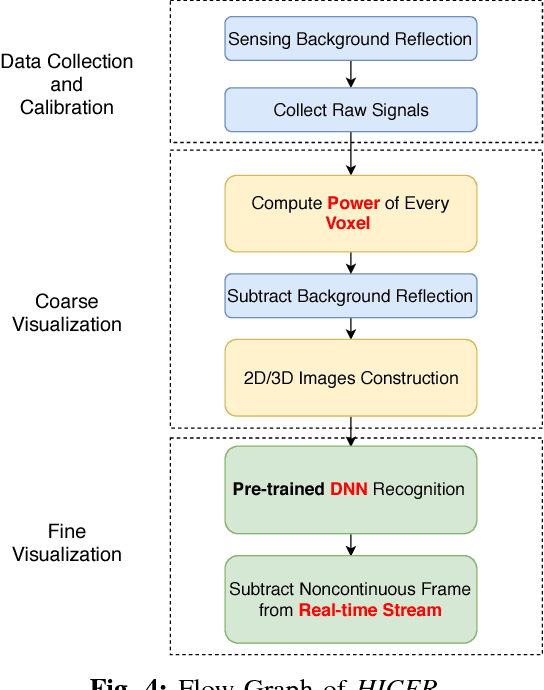
Most smart systems such as smart home and smart health response to human's locations and activities. However, traditional solutions are either require wearable sensors or lead to leaking privacy. This work proposes an ambient radar solution which is a real-time, privacy secure and dark surroundings resistant system. In this solution, we use a low power, Frequency-Modulated Continuous Wave (FMCW) radar array to capture the reflected signals and then construct to 3D image frames. This solution designs $1)$a data preprocessing mechanism to remove background static reflection, $2)$a signal processing mechanism to transfer received complex radar signals to a matrix contains spacial information, and $3)$ a Deep Learning scheme to filter broken frame which caused by the rough surface of human's body. This solution has been extensively evaluated in a research area and captures real-time human images that are recognizable for specific activities. Our results show that the indoor capturing is clear to be recognized frame by frame compares to camera recorded video.
Shared Multi-Task Imitation Learning for Indoor Self-Navigation
Aug 14, 2018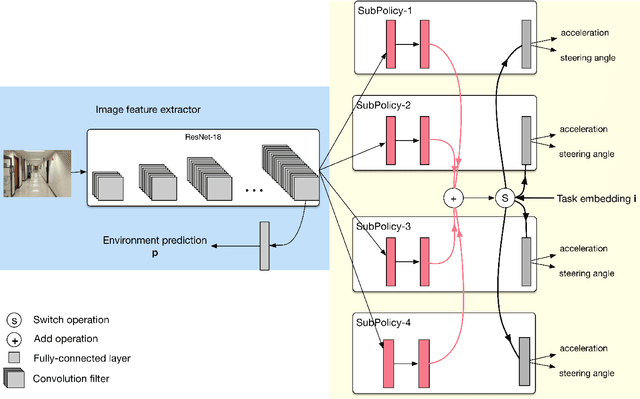
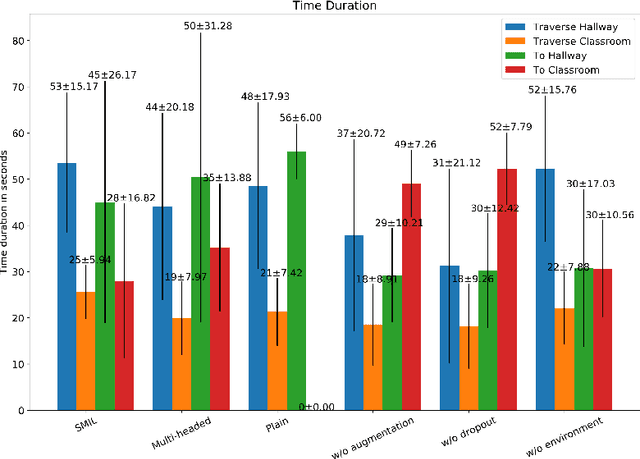
Deep imitation learning enables robots to learn from expert demonstrations to perform tasks such as lane following or obstacle avoidance. However, in the traditional imitation learning framework, one model only learns one task, and thus it lacks of the capability to support a robot to perform various different navigation tasks with one model in indoor environments. This paper proposes a new framework, Shared Multi-headed Imitation Learning(SMIL), that allows a robot to perform multiple tasks with one model without switching among different models. We model each task as a sub-policy and design a multi-headed policy to learn the shared information among related tasks by summing up activations from all sub-policies. Compared to single or non-shared multi-headed policies, this framework is able to leverage correlated information among tasks to increase performance.We have implemented this framework using a robot based on NVIDIA TX2 and performed extensive experiments in indoor environments with different baseline solutions. The results demonstrate that SMIL has doubled the performance over nonshared multi-headed policy.
Avoidance of Manual Labeling in Robotic Autonomous Navigation Through Multi-Sensory Semi-Supervised Learning
Feb 20, 2018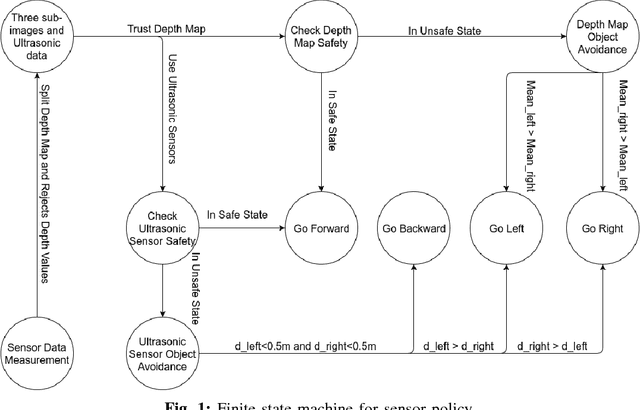
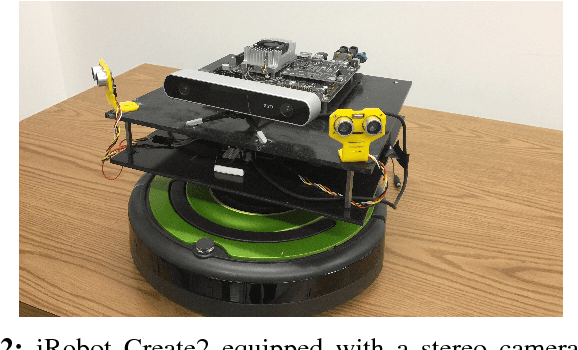
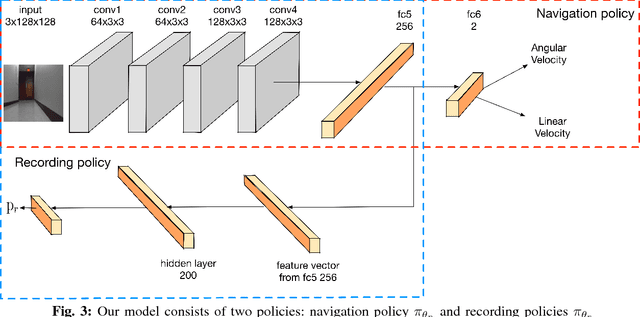
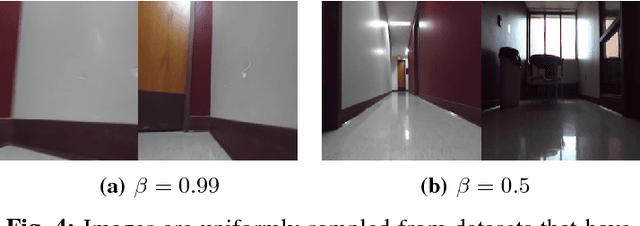
Imitation learning holds the promise to address challenging robotic tasks such as autonomous navigation. It however requires a human supervisor to oversee the training process and send correct control commands to robots without feedback, which is always prone to error and expensive. To minimize human involvement and avoid manual labeling of data in the robotic autonomous navigation with imitation learning, this paper proposes a novel semi-supervised imitation learning solution based on a multi-sensory design. This solution includes a suboptimal sensor policy based on sensor fusion to automatically label states encountered by a robot to avoid human supervision during training. In addition, a recording policy is developed to throttle the adversarial affect of learning too much from the suboptimal sensor policy. This solution allows the robot to learn a navigation policy in a self-supervised manner. With extensive experiments in indoor environments, this solution can achieve near human performance in most of the tasks and even surpasses human performance in case of unexpected events such as hardware failures or human operation errors. To best of our knowledge, this is the first work that synthesizes sensor fusion and imitation learning to enable robotic autonomous navigation in the real world without human supervision.