 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Multi-Task Imitation Learning for Indoor Self-Navigation
Aug 14, 2018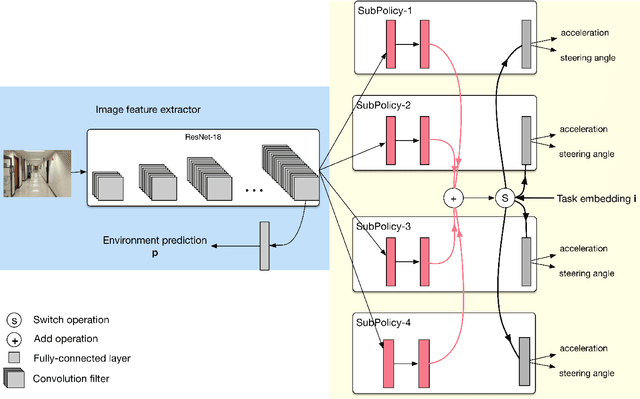
Deep imitation learning enables robots to learn from expert demonstrations to perform tasks such as lane following or obstacle avoidance. However, in the traditional imitation learning framework, one model only learns one task, and thus it lacks of the capability to support a robot to perform various different navigation tasks with one model in indoor environments. This paper proposes a new framework, Shared Multi-headed Imitation Learning(SMIL), that allows a robot to perform multiple tasks with one model without switching among different models. We model each task as a sub-policy and design a multi-headed policy to learn the shared information among related tasks by summing up activations from all sub-policies. Compared to single or non-shared multi-headed policies, this framework is able to leverage correlated information among tasks to increase performance.We have implemented this framework using a robot based on NVIDIA TX2 and performed extensive experiments in indoor environments with different baseline solutions. The results demonstrate that SMIL has doubled the performance over nonshared multi-headed policy.